Why not gyro stabilized helo deck ?

You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
XFY-1 and XFV-1 competition
- Thread starter devi
- Start date
Bill Walker
Per Ardua ad Nauseum
Justo Miranda said:Why not gyro stabilized helo deck ?
That helps 3 of the six degrees of freedom the deck has. You are still left with three translational movements, all occuring at the same time.
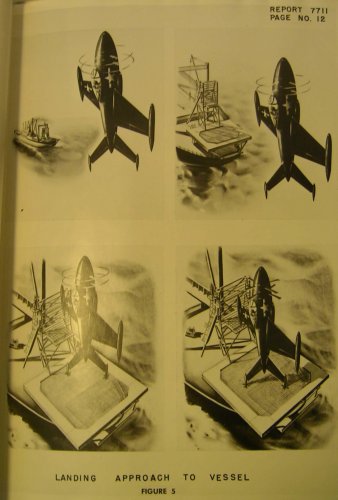
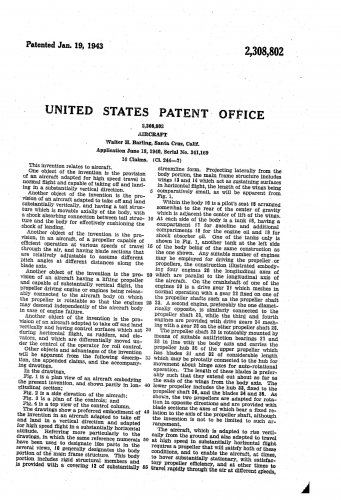
I had wondered what Lockheed was thinking, but particularly with respect to the extremely poor turnover angle. The Convair delta-wing configuration had an advantage from that standpoint as well as providing a high-angle-of-attack capability that allowed a more or less level-flight transition when converting back to propeller-borne flight. It turned out that Lockheed had thought about both. In the L-200 proposal, they suggested a special landing platform manned by an LSO to allow ship-based operation. (It's not clear in the illustration, but the landing platform was mounted on actuators that stabilized it so it stayed level in roll; the ship's pitching motion was to be accommodated by a net that would be pierced by the aft end of a tip tank.) The pilot was to fly through a vertical-flight autopilot on approach, coached by the LSO. Once in position over the landing platform, the pilot would chop the throttle on the LSO's call when the deck was reasonably quiescent. Shock-absorbing struts on the tips of the tail fins would engage a net on the landing platform so the airplane could not slide. Note that at this point the airplane had three tail fins, not four. With respect to the transition advantage, Lockheed claimed that it would be achieved through the use of an autopilot. (The Navy OS-122 allowed a maximum altitude gain of 500 feet when going from wing-borne to propeller-borne flight but Lockheed wasn't about to cede any advantage to Convair.)
Attachments
Bill Walker
Per Ardua ad Nauseum
So, at the end of a max performance flight with a 1950s vintage gas turbine, sitting in a high power hover, waiting for the LSO to call "deck steady".  Sounds a little tense to me.
Sounds a little tense to me.
Sounds a little tense to me.- Joined
- 13 June 2007
- Messages
- 2,172
- Reaction score
- 3,070
- Joined
- 13 June 2007
- Messages
- 2,172
- Reaction score
- 3,070
Thanks - put it there too.
Enjoy the Day! Mark
Enjoy the Day! Mark
- Joined
- 16 February 2013
- Messages
- 132
- Reaction score
- 605
PROJECT HUMMINGBIRD (USN/USAAC- 1946/7): This Project is mentioned in both the Steve Ginter books on the XFV and XFY, it is mentioned by Joseph Chambers in his numerous NASA Langley histories in the VTOL chapters and his book "Radical Wings & Wind Tunnels", and most recently it is referred to in Bill Rose's new book "Vertical Take-Off Fighter Aircraft". I don't have Mr. Rose's contact, but on talking to Mr. Ginter and Mr. Chambers neither has ever seen any original documentation on this project. I have looked in the Archives, checked with the Wright Patterson historians, as well as the Air Material Command historian, and have been unsuccessful. Any help would be appreciated.
W
Wingknut
Guest
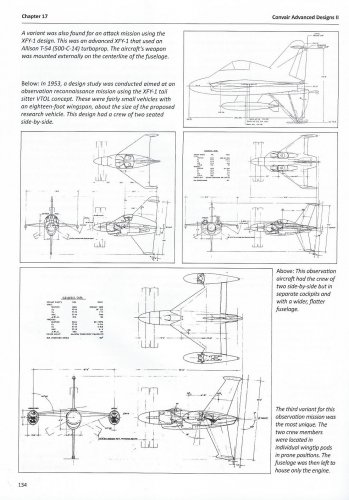
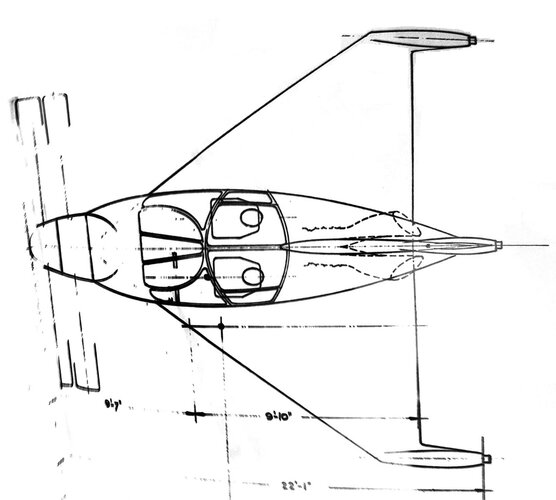
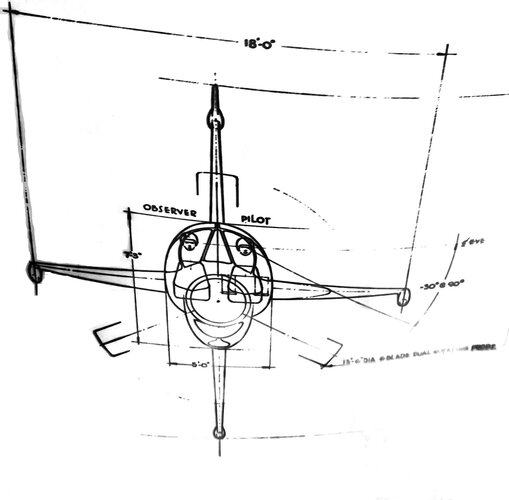
Further to the prone-pilot Chana variant of the Convair XFY-1, sorry if this is old news but Robert E. Bradley’s ‘Convair Advanced Designs II - Secret Fighters, Advanced Aircraft, and Unique Concepts 1929-1973’ mentions a proposed two-man development of the prone Pogo which would have had two crew-nacelles, one on each wing-tip.
(Thumbnail below – the two-nacelles design is at the bottom. If the attached is too big, I will of course remove it post-haste.)
See sample pages from Bradley's book here:
http://web.ipmsusa3.org/content/convair-advanced-designs-ii-secret-fighters-advanced-aircraft-and-unique-concepts-1929-1973
Thanks, ‘Wingknut’
(Thumbnail below – the two-nacelles design is at the bottom. If the attached is too big, I will of course remove it post-haste.)
See sample pages from Bradley's book here:
http://web.ipmsusa3.org/content/convair-advanced-designs-ii-secret-fighters-advanced-aircraft-and-unique-concepts-1929-1973
Thanks, ‘Wingknut’
Attachments
Steve Pace
Aviation History Writer
- Joined
- 6 January 2013
- Messages
- 2,266
- Reaction score
- 224
W
Wingknut
Guest
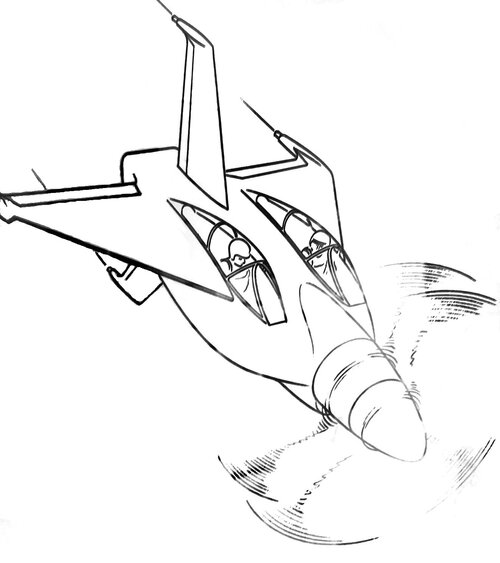
Some snapshots of art-work apparently showing the Chana prone-pilot / gun-pod variant of the XFY-1 Pogo
Taken from a video I'm not otherwise overly impressed with, I must confess:
https://www.youtube.com/watch?v=WxVWH9mOYGA
Taken from a video I'm not otherwise overly impressed with, I must confess:
https://www.youtube.com/watch?v=WxVWH9mOYGA
Attachments



Neat stuff, but what a terrible idea. What would the forces have been like on a pilot in quick roll in combat?
- Joined
- 25 June 2009
- Messages
- 14,717
- Reaction score
- 6,039
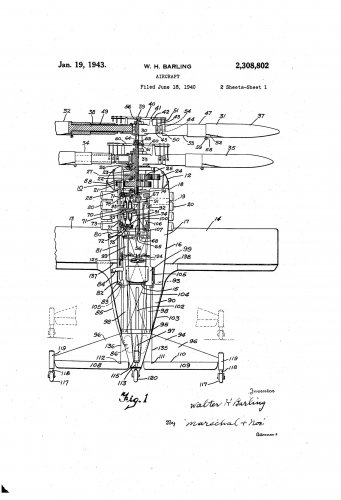
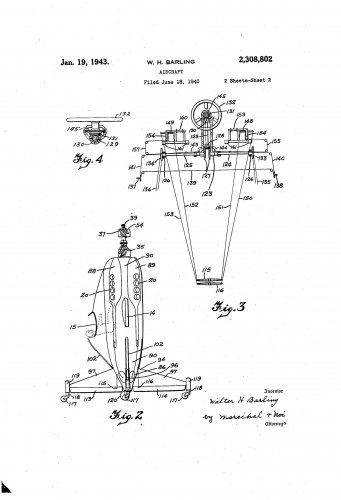
Steve Pace said:Did Walter H. "Walt" Barling - father of the Barling Bomber, beat Convair (XFY-1) and Lockheed (XFV-1) to the punch with the creation of a VTOL airplane design in 1940? -SP
That was some nice find! Wish I could have thanked Steve for it. Indeed, Mr. Barling seems to have been ahead of his time on quite a few occasions—not always with ideas that ended up working, unfortunately... (only his Nicholas-Beazley NB-3 reached some degree of success, being produced in quantity; the NB-4 was also produced but didn't fare nearly as well)
NUSNA_Moebius
I really should change my personal text
- Joined
- 26 May 2012
- Messages
- 233
- Reaction score
- 135
Is there any confirmed data on the max speeds attained for either aircraft? The XFV-1 was obviously hampered by it's landing gear rigging, so I'm particularly more interested in what the Pogo achieved.
I just feel like it should own the prop world speed record with it's kind of power to weight ratio, though I can see the induced drag of the delta wing and the parasitic drag of the fins and tall cockpit being an issue there. Also I think only the Soviets were pushing the very high blade angle of attacks necessary for achieving the very high speeds attained by the Tu-95 and Tu-114. Correct me if I'm wrong.
I just feel like it should own the prop world speed record with it's kind of power to weight ratio, though I can see the induced drag of the delta wing and the parasitic drag of the fins and tall cockpit being an issue there. Also I think only the Soviets were pushing the very high blade angle of attacks necessary for achieving the very high speeds attained by the Tu-95 and Tu-114. Correct me if I'm wrong.
- Joined
- 26 May 2006
- Messages
- 34,781
- Reaction score
- 15,660
Lockheed VTO parachute.
It's here;
As I recall, the landing transition to vertical flight was a problem also. Even with perfect ergonomics, landings required a pullup maneuver that put the aircraft at a considerable altitude that required a long, fuel-consuming descent. I'd guess that the Pogo would have to descend fairly slowly to avoid putting it's highly loaded airscrew into the "swirl-mode" that's claimed at least one V-22.
One advantage of the delta wing on the FY-1 was that it not only could reach a fairly high angle of attack, it generated a lot of drag as angle of attack increased. As a result, a zoom climb was not necessary to kill speed and bring it to a vertical attitude.
- Joined
- 27 December 2005
- Messages
- 17,701
- Reaction score
- 26,079
PLEASE stop putting Youtube links in URL tags. Simply paste the URL into the document and it will automatically be embedded in the post (Like above).
- Joined
- 9 October 2009
- Messages
- 21,927
- Reaction score
- 13,525

Convair XFY Pogo: STAY AT HOME !!!
Learning to walk before you run. The Pogo getting ready for its indoors tests inside the humongous dirigible hangar at Moffett Field, California (June, 1954). The aircraft was suspended from a toug…
 elpoderdelasgalaxias.wordpress.com
elpoderdelasgalaxias.wordpress.com
- Joined
- 17 May 2008
- Messages
- 683
- Reaction score
- 1,439
Some mock-up report files from the June 1951 FY-1 (Convair Model 5) Mock-Up Report [NARA RG 402]
Attachments
-
![x-FY-1-Mock-up-Cockpit-looking-down-[Convair-Model-5]-195106.jpg](/data/attachments/180/180474-8d3f62fe3a3dcbdefd66723f74833a9b.jpg) x-FY-1-Mock-up-Cockpit-looking-down-[Convair-Model-5]-195106.jpg121.1 KB · Views: 165
x-FY-1-Mock-up-Cockpit-looking-down-[Convair-Model-5]-195106.jpg121.1 KB · Views: 165 -
![x-FY-1-Mock-up-Engine-and-Transmission-Installation-[Convair-Model-5]-195106.jpg](/data/attachments/180/180475-d7b81f39fa8c8955220d71d9a73177fc.jpg) x-FY-1-Mock-up-Engine-and-Transmission-Installation-[Convair-Model-5]-195106.jpg96.5 KB · Views: 151
x-FY-1-Mock-up-Engine-and-Transmission-Installation-[Convair-Model-5]-195106.jpg96.5 KB · Views: 151 -
![x-FY-1-Mock-up-Instrument-Board-[Convair-Model-5]-195106.jpg](/data/attachments/180/180476-7f7636e86fde42d86be352540cc41e9f.jpg) x-FY-1-Mock-up-Instrument-Board-[Convair-Model-5]-195106.jpg107.6 KB · Views: 178
x-FY-1-Mock-up-Instrument-Board-[Convair-Model-5]-195106.jpg107.6 KB · Views: 178 -
![x-FY-1-Mock-up-Left-Side-View-[Convair-Model-5]-195106.jpg](/data/attachments/180/180477-fef66ecb19e7ca6703c2d8dd5f7ce2a4.jpg) x-FY-1-Mock-up-Left-Side-View-[Convair-Model-5]-195106.jpg76.6 KB · Views: 157
x-FY-1-Mock-up-Left-Side-View-[Convair-Model-5]-195106.jpg76.6 KB · Views: 157 -
![x-FY-1-Mock-up-Rear-View-[Convair-Model-5]-195106.jpg](/data/attachments/180/180478-dd597e845d0f44373368c984bb303f84.jpg) x-FY-1-Mock-up-Rear-View-[Convair-Model-5]-195106.jpg89.3 KB · Views: 146
x-FY-1-Mock-up-Rear-View-[Convair-Model-5]-195106.jpg89.3 KB · Views: 146 -
![x-FY-1-Mock-up-Top-View-[Convair-Model-5]-195106.jpg](/data/attachments/180/180479-27782dcf014b70bf0ff5fb50e87b39b7.jpg) x-FY-1-Mock-up-Top-View-[Convair-Model-5]-195106.jpg87.3 KB · Views: 158
x-FY-1-Mock-up-Top-View-[Convair-Model-5]-195106.jpg87.3 KB · Views: 158 -
![x-FY-1-Mock-up-Upper-Left-Side-View-[Convair-Model-5]-195106.jpg](/data/attachments/180/180480-2de1a96784029bd5aa50217b433587f1.jpg) x-FY-1-Mock-up-Upper-Left-Side-View-[Convair-Model-5]-195106.jpg86.3 KB · Views: 223
x-FY-1-Mock-up-Upper-Left-Side-View-[Convair-Model-5]-195106.jpg86.3 KB · Views: 223
Raa
ACCESS: Restricted
- Joined
- 7 December 2020
- Messages
- 40
- Reaction score
- 114
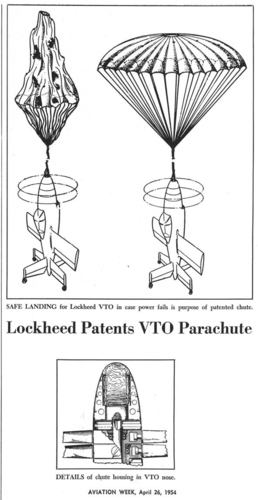
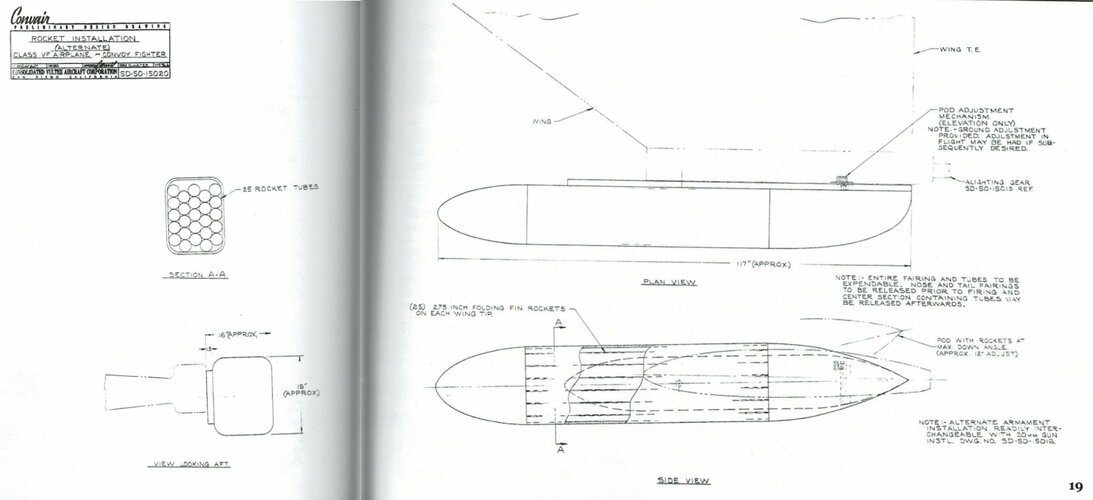
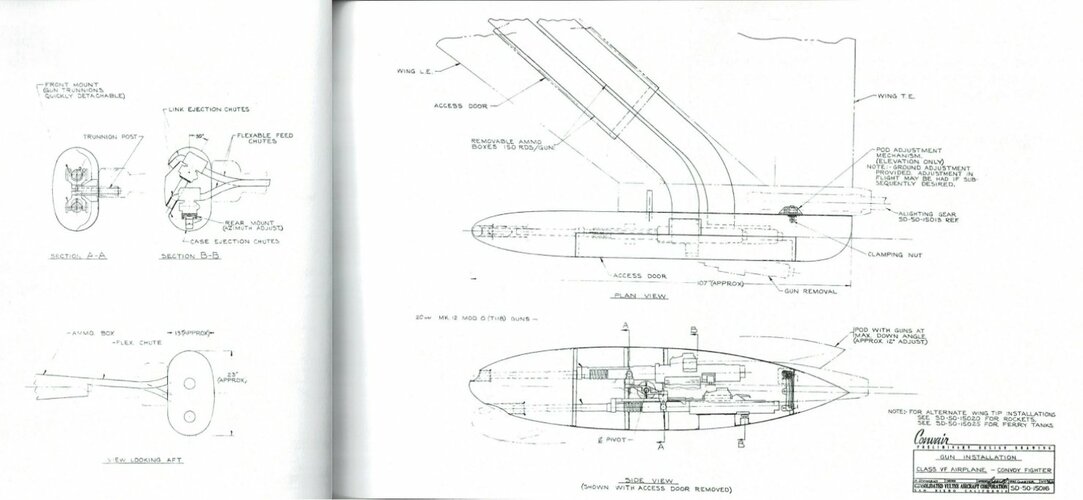
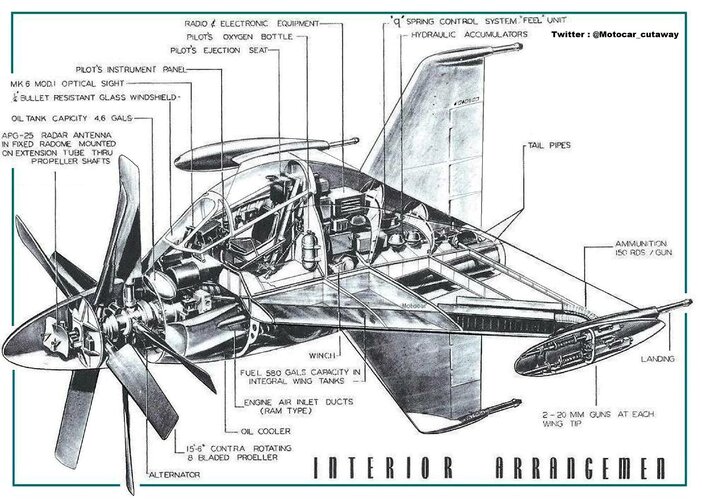
Detail of the XFY-1's wingtip cannons, rocket pods, and expansion tanks.
Interestingly, the cannons and rockets can be pointed 12° down.
Source: JARED A.ZICHEK ''Convair Class VF Convoy Fighter: The Original Proposal for the XFY-1 Pogo''
Interestingly, the cannons and rockets can be pointed 12° down.
Source: JARED A.ZICHEK ''Convair Class VF Convoy Fighter: The Original Proposal for the XFY-1 Pogo''
Attachments
Last edited by a moderator:
- Joined
- 27 December 2005
- Messages
- 17,701
- Reaction score
- 26,079
Raa
ACCESS: Restricted
- Joined
- 7 December 2020
- Messages
- 40
- Reaction score
- 114
I bought his book in paper form, but either way, his book is great, with unknown drawings, mock-up photos, and a wealth of information.

- Joined
- 11 March 2012
- Messages
- 3,244
- Reaction score
- 3,170
During the summer of 1985, AETE (CFB Cold Lake, Alberta) sent a team of engineers down to CFB Shearwater to study how Sea King helicopters landed on ships' decks. They installed tape measures on control sticks and cameras looking over the pilots' shoulders. One thing they wanted to measure was which visual cues that pilots used during various phases of the landing process.I seem to recall that one of the reasons the VTOL fighter program was cancelled was the difficulty in performing the vertical landing on the small escort ships the aircraft was intended for, in rough seas. I'm not sure that modern fly-by-wire solutions would make this any better. The Canadian military and at least one contractor did a lot of theoretical research in the 1980s into landing helicopters onto small ships using autopilots driven by sensors picking up targets on the bouncing ship, and decided that a human in the loop, plus Beartrap, was still the best way to go.
I removed that test gear from the test Sea King, but never heard conclusions. Hint: CAF stuck with the Beartrap system since then.
- Joined
- 11 March 2012
- Messages
- 3,244
- Reaction score
- 3,170
During flying stations, the flight deck of HMCS Iroquois rolled, pitched, yawed, raised, lowered, moved to port, moved to starboard, moved forward and moved aft. The farther the flight deck is above the centroid of movement, the greater the variation.Justo Miranda said:Why not gyro stabilized helo deck ?
That helps 3 of the six degrees of freedom the deck has. You are still left with three translational movements, all occuring at the same time.
1960s vintage electronic stabilizers could not think fast enough to stabilize a flight deck. Also consider the weight of a flight deck. It was to accommodate a 21,000 pound helicopter landing hard hundreds of times.
During the 1980s (?) Bae experimented with a stabilized crane to grab VTOL Harriers out of the air. The goal was to hover a Harrier alongside a frigate and use the crane to catch and swing it inboard for re-fueling, bombing up and maintenance. They even sketched a fuel hose down the center of the crane head to allow it to refuel Harriers as they hung alongside a frigate. They did a few test-landings while based on concrete, but never but the "Skyhook" system into operation. The entire crane probably weighed less than 1/10 that of of a soldi flight deck.
- Joined
- 6 September 2006
- Messages
- 4,823
- Reaction score
- 9,406
There was a static pitching deck rig at RAE Bedford used for Wasp trials. So in theory if you could mimic a rolling deck you ought to be able to do the opposite, but as you say lag between the sensors and hydraulics might make it too problematic to actually give a stable deck.
Plus its a lot of mechanical gubbins to maintain or to break down. So it would't really be a practical proposition. Beartrap was a lot simpler.
Plus its a lot of mechanical gubbins to maintain or to break down. So it would't really be a practical proposition. Beartrap was a lot simpler.
Thanks guys, I learned something new (Beartrap).
Funny enough, I went with a similar system for tethered drones on vehicles without event being aware of the similarities.
Funny enough, I went with a similar system for tethered drones on vehicles without event being aware of the similarities.
- Joined
- 5 May 2007
- Messages
- 1,475
- Reaction score
- 2,835
This is what ultimately killed Skyhook as a practical proposition. If there's any appreciable lag, the result is actually worse than doing nothing because the movement doesn't match the visual cues.lag between the sensors and hydraulics might make it too problematic to actually give a stable deck
It can be done, but the technology to make it possible wasn't really available until the late 2000s.
Magnum_Force
ACCESS: Restricted
- Joined
- 4 February 2022
- Messages
- 17
- Reaction score
- 22
I think with a bit of refinement the Pogo could have worked. Replace the single ventral fin with 2 smaller ventral fins with intending landing gear / pogo sticks for VTOL landing. Include wheels on these somewhere, in addition to a long front landing gear, so that conventional landing would be possible.
In terms of VTOL landing, simply using a large mirror in the cockpit, along with a powerful and focused landing light in the rear of the aircraft would probably be sufficient. The mirror could have measurements on it that would correspond to the size of the landing light reflection, giving the pilot a crude way of knowing how far he was from the ground.
In terms of VTOL landing, simply using a large mirror in the cockpit, along with a powerful and focused landing light in the rear of the aircraft would probably be sufficient. The mirror could have measurements on it that would correspond to the size of the landing light reflection, giving the pilot a crude way of knowing how far he was from the ground.
Firefinder
ACCESS: Top Secret
- Joined
- 5 October 2019
- Messages
- 1,039
- Reaction score
- 1,881
They did try the mirror trick on another design that landed similarly.In terms of VTOL landing, simply using a large mirror in the cockpit, along with a powerful and focused landing light in the rear of the aircraft would probably be sufficient. The mirror could have measurements on it that would correspond to the size of the landing light reflection, giving the pilot a crude way of knowing how far he was from the ground.
And it didn't work.
With it being where the Odject in Mirror are Closer Then Appears comes from. They couldn't get it calibrated right to work and the mirror need a size that it got in the way while flying.
The Soviets even tried making thr seat tilt while have a full bubble cockpit so one just needs to look down.
Pilots got Vertigo and nearly crashed.
It only recently that Pogo landings became easy.
And thats to fly by wire autopilot taking the stick and doing the job itself with the V-BAT drones.
- Joined
- 2 August 2006
- Messages
- 3,253
- Reaction score
- 1,518
I think with a bit of refinement the Pogo could have worked. Replace the single ventral fin with 2 smaller ventral fins with intending landing gear / pogo sticks for VTOL landing. Include wheels on these somewhere, in addition to a long front landing gear, so that conventional landing would be possible.
In terms of VTOL landing, simply using a large mirror in the cockpit, along with a powerful and focused landing light in the rear of the aircraft would probably be sufficient. The mirror could have measurements on it that would correspond to the size of the landing light reflection, giving the pilot a crude way of knowing how far he was from the ground.
That was only one of the "minor" problems. The major problem was the powerplants back then were still quite marginal in hover.
- Joined
- 13 August 2007
- Messages
- 8,399
- Reaction score
- 10,848
Some info on Martin 262 Convoy Fighter
View: https://www.youtube.com/watch?v=KXzWGhlBqI4
Convair Pogo
View: https://www.youtube.com/watch?v=GsqqavH8Esc
Convair Pogo
- Joined
- 29 January 2008
- Messages
- 914
- Reaction score
- 2,031
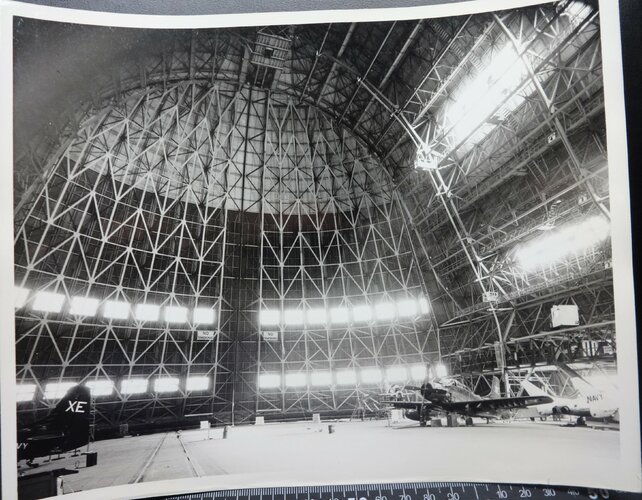
Years ago, I picked up a nice group of B&W glossy photos of testing the XFY-1 in the Blimp Hanger at Moffett. They are 8x10 and stamped/numbered Consolidated Vultee or Convair on the back. I thought I would share a few. I have not checked out the Zichek book yet, sorry for any image repost's. The 2 wind tunnel photos are from the NACA.
Attachments
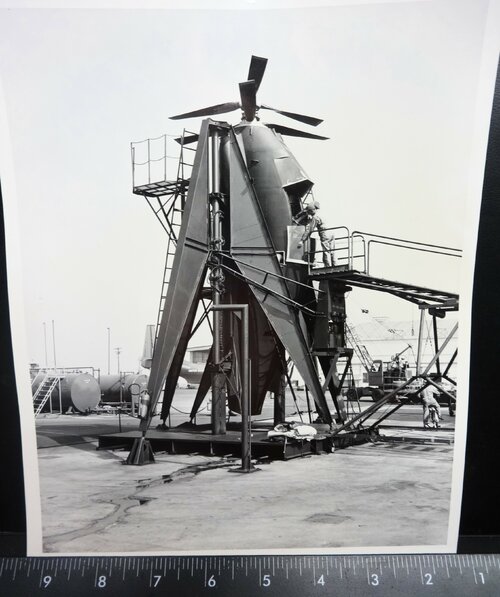
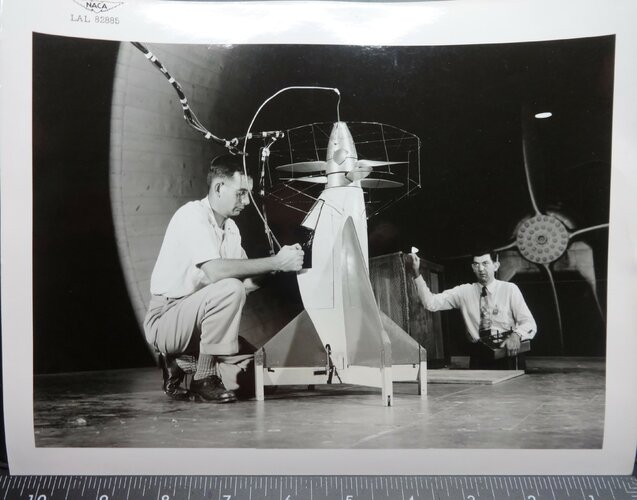
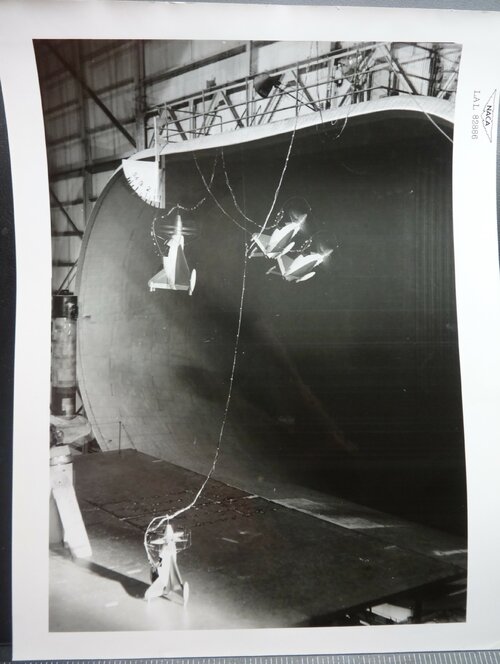
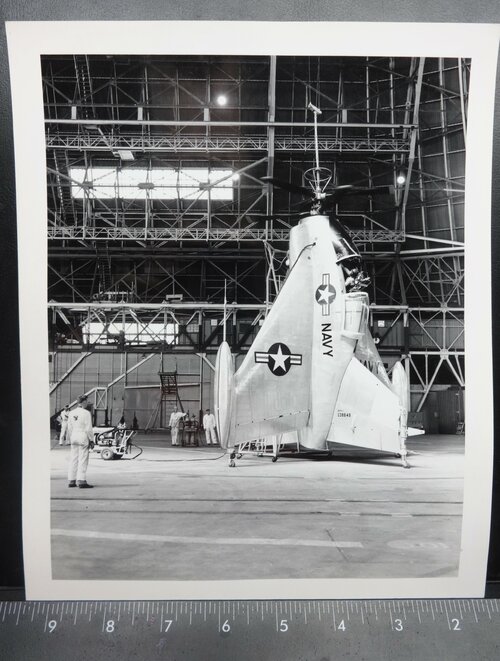
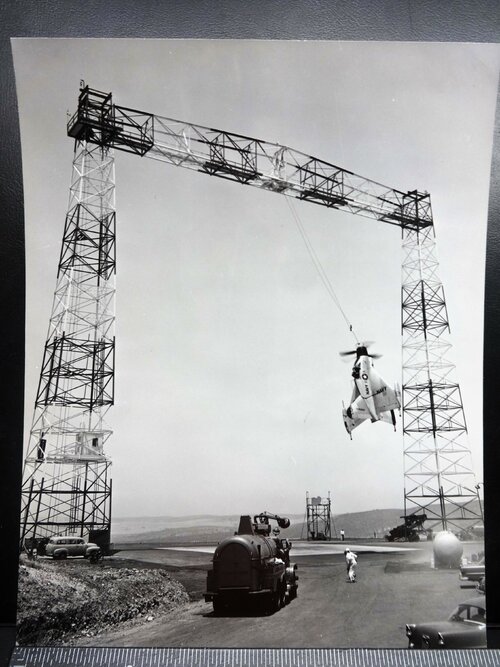
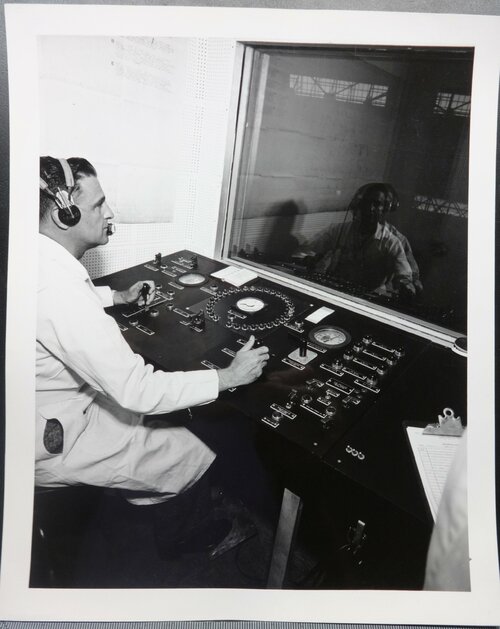
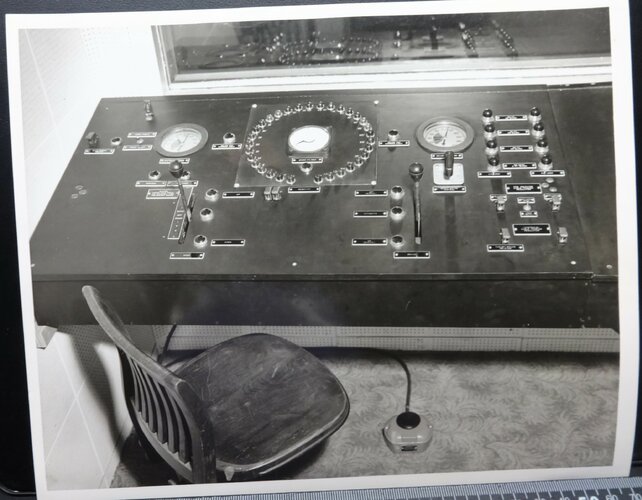
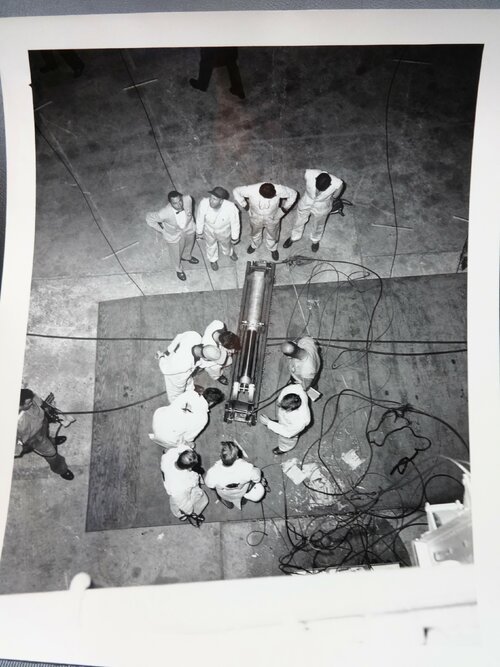
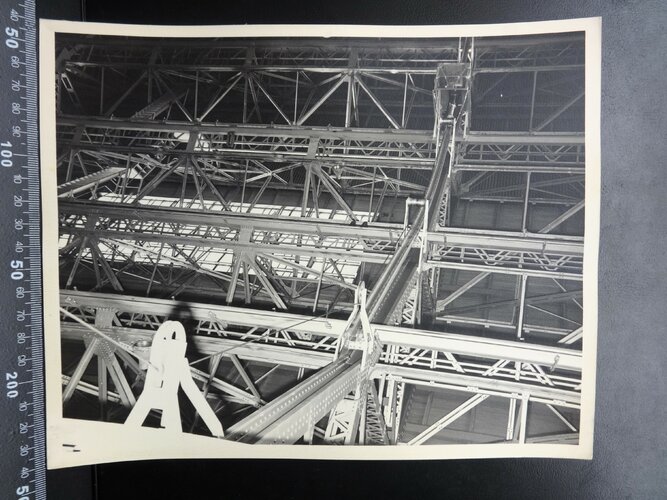
These are details of the tether controls for in-hanger testing at Moffett. 1. This might be Bob McGeary at the cable controls. He is seated at the window of the small white control room pictured in many photographs. 2. Looking at the end of the hanger where the tests were performed, the Pogo is parked horizontally behind the AD-5 Sky Raider, under the door strip windows. Notice the control room and the cable trays going up to the ceiling, 195' up! 3. Close-up of the tether controls, notice foot pedal and acoustic wall tile. 4. What could go wrong? 5. I think this picture was taken looking straight up following the cable and pullies to the ceiling.
Attachments
Similar threads
-
-
McDonnell XHCH-1 Navy cargo-unloading helicopter Competition
- Started by nugo
- Replies: 31
-
Contenders for the MX-948 Competition (leading to the XB-55)
- Started by devi
- Replies: 43
-
-