Source: AIAA 2004-5888
An Essential Element in Affordable Space Access is the Return Vehicle. A Historical Perspective Based on Support Vehicles
for the Manned Orbiting Laboratory, circa 1964
Paul A. Czysz
HyperTech Concepts LLC, St. Louis, Missouri 63141, U.S.A.
Claudio Bruno.
University of Rome,<LA SAPENZA> Rome Italy
Ying-Ming Lee
MSE Technology Application, Butte, Montana. U.S.A.
Space 2004 Conference and Exhibit
28 - 30 September 2004, San Diego, California
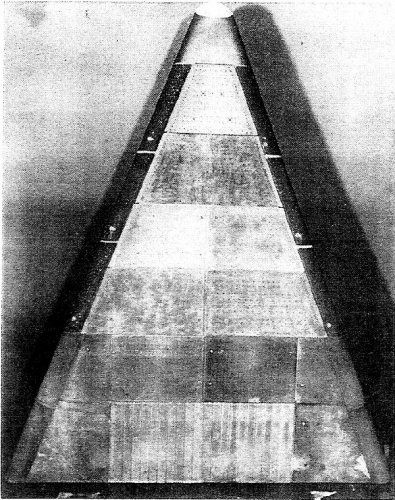
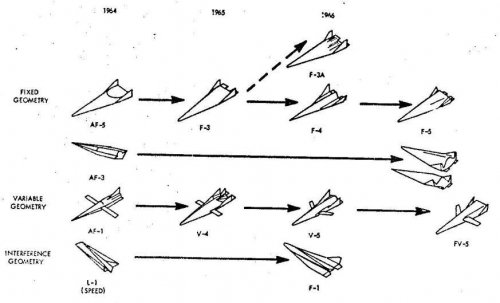
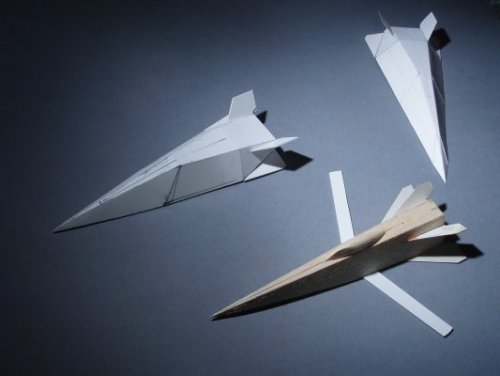
Photo shows the array of delta planform configurations that the Flight Dynamics Laboratory had considered in the 1958 to 1968 time
period. Specifically identified on the photo are:
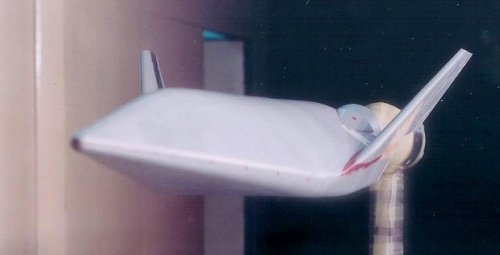
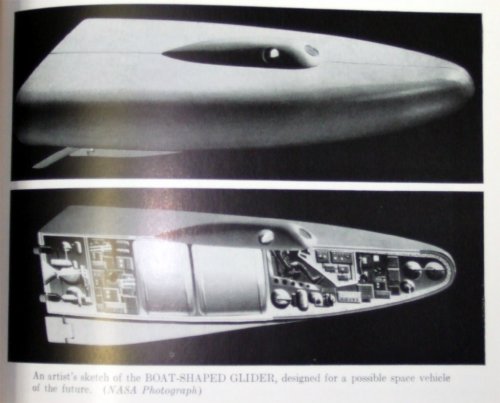
Configuration 2 was a higher wing loading, relatively blunt all body with an upswept spatular nose that is not
unlike the BOR series of Lozino-Lozinski hypersonic gliders from Russia. Because of the longitudinal extent of the
former USSR compared to the USA, the minimum lift-to-drag ratio to assure a landing on the continental USSR
land mass. The USSR requirement is for an L/D of about 1.7, whereas for the USA it is about 2.7. Thus, the lower
lift-to-drag ratio minimizes the possibility for a Russian spacecraft to land in the continental United States without a
long waiting period.
Configuration 3 was a subscale research vehicle to evaluate the thermodynamics and materials for hypersonic
gliders. The nose and leading edge radii were full-scale size of the X-20. ASSET was successfully flown on a Thor
IRBM booster. One that was recovered from its landing in the ocean was for a time on display in the USAF Museum
in Dayton, Ohio.
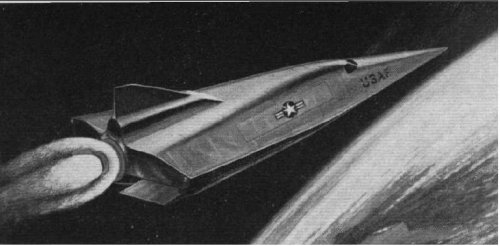
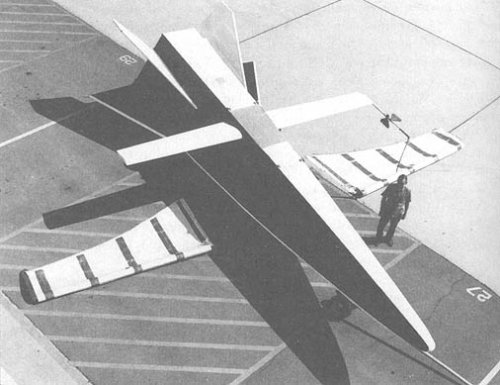
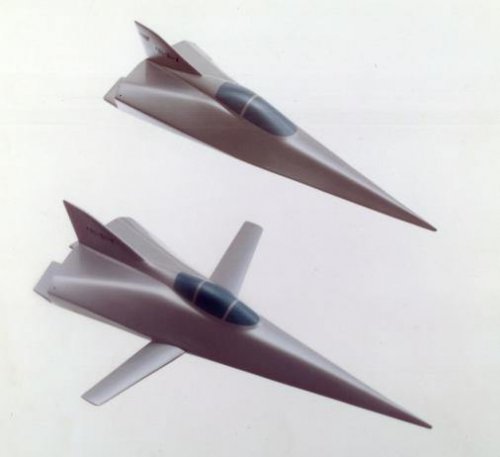
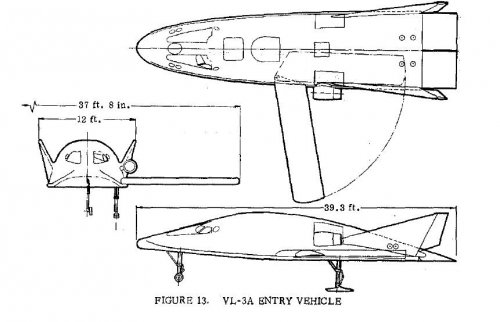
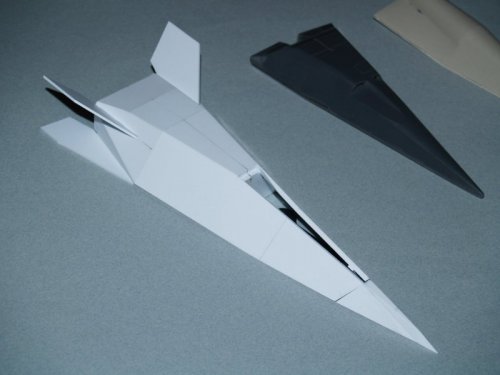
Configuration 4 was a product of cooperation between the Flight Dynamics Laboratory (Alfred Draper) and
McDonnell Douglas Astronautics Company, St. Louis (Robert Masek) to develop a vehicle to support the Manned
Orbiting Laboratory (MOL). This concept was briefed to the US Air Force in 1964. The variable geometry
switchblade wing permitted landing with heavy loads returning from space, and could eventually permit horizontal
takeoff. The tail configuration was an experimentally determined configuration feature. This configuration was
wind tunnel tested and demonstrated inherent stability and control over the speed range from Mach 22 to landing
speed. Paul Czysz was at the Flight Dynamics Laboratory from 1956 to 1963 and at McDonnell from 1963
onwards witnessed these configurations being developed.
Configuration 6 was a product of the Flight Dynamics Laboratory (Richard D. Neumann) to reduce the drag
of hypersonic gliders. Based on the physics that a two-dimensional wedge has less drag the a right circular cone of
the same volume, Neumann devised the “spatular leading edge”.
It is essentially a Spatular nosed version of Configuration 5. John (Jack) Pike of the RAE and Cranfield Technical Institute developed analogous configurations independently and published the wind tunnel and analytical work in 1973. Robert Krieger of McDonnell Douglas Astronautics, St. Louis also developed a Newtonian analysis of spatular noses8. The wind-body configuration was
the basis of the X-20.
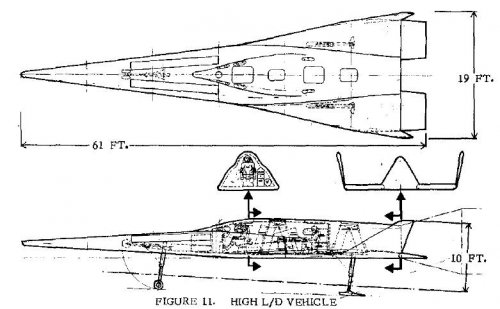
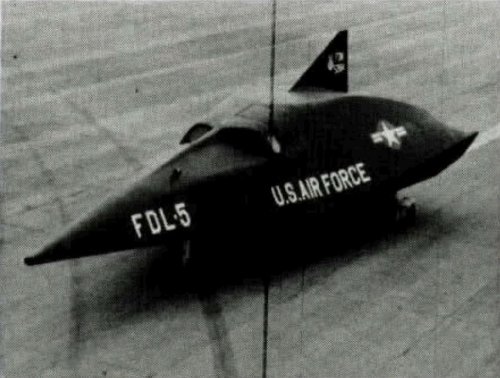
Configuration 7 and the other lifting body configurations were FDL-7C/D class of configurations with a partial
horizontal surface and a vertical control surface. Without the “X” type tail configurations of the FDL-7C/D the
control capability was reduced and the usable lift-to-drag ratio was less. But nevertheless proved instrumental in
developing the FDL high lift-to-drag ratio configurations.
Configuration 8 is a FDL version of the NASA Langley HL-10 hypersonic glider.
Configuration 9 is a model of the Ames/Eggers M2/F2 half-cone derived configuration.
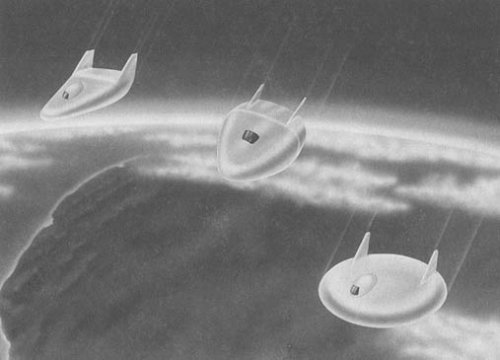
Configuration 10 is an adaptation of the Russian “Star Body” concept that The limitation is the configuration
concept is severely volume limited and had a high ratio of wetted (surface) area per planform area. This is an
adaptation of that concept to the FDL class delta gliders to evaluate the controllability provided by the star configuration.
In the process of adapting the star body configuration to the FDL delta configuration, the ability to have an
independent entry orientation was lost.
Configuration 1 is the X-24B or its AFFDL counterpart the FDL-8. It represents the different approach to hypersonic glider configurations by NASA and AFFDL. Martin Marietta built the X-24A at its Denver, Colorado facilities. The X-24A is a round fuselage configuration with outboard high dihedral angle vertical tails typical of the Ames Eggers vehicles and the Langley HL-19. All the configurations of this type have serious lateraldirectional stability problems at low speeds and tend to roll about the horizontal axis. One designer who solved the problem with variable dihedral vertical tails (+60 to –10 degrees) was Gleb Lozino-Lozinski of Russia. The Flight Dynamics Laboratory solved the problem by using flat bottom configurations. Under a USAF Flight Dynamics Laboratory program, Martin modified the X-24A into flat-bottomed configuration with trailing edge elevons called the X-24B. Bill Dana was the NASA pilot that flew the X-15, X-24A and X-24B. His comments about the change in slow speed performance with the X-24B confirmed the advantage of the Flight Dynamics Laboratory approach. The basis of the X-24B was the FDL-8 configuration.