Mason’s Perspective on the X-29
Originally written in October 2007
Rev. Sept 21, 2008
Because of the interest shown by some instructors at the Air Force Academy (USAFA) in the X-
29, I wrote up my version of the story. The first flight was in December of 1984, and the 2nd
plane flew through about 1990 or so. The second X-29 had a novel control concept, with the
pilot operating small jets that controlled the forebody vortices to enhance yaw control at high
alpha. Grumman did little to exploit the success publicly. Very few technical papers were written
by Grumman folks, but lots eventually came out of NASA Dryden and, checking the data bases,
there were also numerous papers from USAFA. Grumman didn’t get much credit for the good
things that happened in the program (unfortunately common when working with NASA,
Grumman was just “the contractor”). It seems there’s a lot of misinformation about the program.
Since the X-29 didn’t fit into NASA or Air Force plans with the F-18 HARV or the X-31, and by
then stealth, it was mainly a curiosity. However, the program was successful. Hundreds of flights
were made, and both planes are still around in museums. Although some sources say it was an F-
5 with mods (and Grumman had hoped this would be the case), it turned out that everything
behind the cockpit was new. In addition, the use of F-16 actuators led to large “canoes” on the
wing, that resulted in lots of drag at supersonic speeds. Although never intended to demonstrate
significant supersonic capability, it has been reported that a big problem was high supersonic
drag (by the time it flew, supercruise had become a key Air Force requirement for new fighters).
Yes, supersonic drag was high, but was never considered an issue in the design. The design was
all about high sustained transonic maneuver – the classical M = 0.9 design point (corner point).
These notes provide both a description of how the plane came to be from a technical standpoint,
and also describe the company culture that surrounded events. It’s hard to separate the two.
The X-29 arose accidentally. There was never any plan by any agency to build a tactical
forward swept wing airplane, the demonstrator of the technology just somehow happened.
HiMAT
Grumman competed for the NASA highly maneuverable aircraft technology (HiMAT)
program around 1973 or 1974. This program was intended to demonstrate the integration of
advanced technologies to achieve high sustained transonic maneuver capability. At that time
UAVs were called RPVs, and the idea was to build an RPV to demonstrate the technologies. The
Air Force was also a sponsor. It was assumed that the technologies would be advanced
aerodynamics, aeroelastic tailoring to achieve a passive wing design that would deform to
optimum shape at the various g loads, advanced flight controls (relaxed static stability) and thrust
vectoring. Grumman originally had a configuration similar to the one being proposed by
Rockwell, but Grumman’s evaluation was that with a similar configuration they would lose to
Rockwell. In addition, having just put the F-14 into production, there was a strong sense that a
variable sweep wing should be proposed. Essentially this was dictated by management: “no
proposal goes out the door unless the wing has a pin in it.” So Grumman’s HiMAT proposal used
a variable sweep wing with an advanced supercritical airfoil and an aeroelastically tailored wing
to obtain its sustained transonic maneuver requirement. The key was to use advanced airfoils and
nominally attached flow at the design point. Grumman was not using the vortex flow concepts
being exploited by the General Dynamics and Northrop folks with the YF-16 and YF-17.
Grumman lost to Rockwell.* Figure 1 shows a sketch of the Grumman configuration, compared
to the winning Rockwell configuration in Figure 2. Note that the YF-16 and YF-17 RFPs came
out in January of 1972, so the timing of HiMAT seems a little strange, although nobody knew
how those programs were going to develop.
Figure 1. The Grumman proposed HiMAT configuration (unknown Grumman notes).
Figure 2. The winning Rockwell HiMAT configuration (AIAA 81-2433).
As part of the technical debrief, NASA said they liked the Gruman supercritical airfoil and
wing design work and offered to test the Grumman concept at Langley. The Grumman proposal
had employed an airfoil known as the Grumman “E”. However, the aero folks had been
continuing to develop airfoils, and had progressed to the “K” airfoil. The E and K airfoils had
been tested in Grumman’s transonic tunnel (a 26 inch test section blow down tunnel). I’ll say
more about the airfoils later. So a wing with the K airfoil was built and tested at Langley. Charlie
McLaughlin and Glenn Spacht were involved. The test produced a key insight.
The key observation was that a highly loaded transonic maneuver wing necessarily has a
strong shock aft on the wing. You don’t want a strong unswept shock – lots of drag! How do you
get a swept shock when it’s at 85% of the chord or more? The trailing edge needs to be swept.
To see the dilemma, consider the trailing edge sweep of the F-16 and F-18. As another
consideration, the thin (6% 2D) airfoils generate a lot of lift on the lower surface, and that seems
to be affected by the leading edge sweep, which you want to be low. Well, an aft swept wing
with inverse taper is one way to get high TE sweep – don’t laugh, Republic, about 10 miles
away, had done it with the XF-91 Thunderceptor. Or, you could propose a forward swept wing.
Looking at the test results, Glenn Spacht decided to propose a forward swept wing as the way
to integrate the high-performance “K” airfoil with the proper planform.
Forward Swept Wing Studies
Glenn Spacht came back to Bethpage and got on the phone. The aeroelastic divergence problem
was well known for forward swept wings, but aeroelastic tailoring of composite structures was a
possible solution. Glenn called Warner Lansing, the Section Head of the Dynamic Structural
Methods Section,* and asked Warner about the possibility of using aeroelastic tailoring to
propose a forward swept wing airplane with an acceptable wing weight while avoiding
divergence. Warner had just read about a PhD dissertation on aeroelastic tailoring by Norris
Krone that seemed to be directly related. He asked his secretary to get a copy. Krone was an Air
Force officer** and was possibly at AFOSR. He was somewhere around DC anyway. As I recall,
he had done the dissertation for Terry Weisshaar, who was then at Maryland. Warner’s secretary
couldn’t talk to Krone, but left a message asking if he’d send a copy of his thesis to Warner.
Apparently Warner was fairly well known in structural circles, having done some of the first
finite element structural analysis (possibly around 1950 or so). When Krone got the message, he
called Warner and asked why he wanted a copy. When Warner told him there seemed to be an
application for Krone’s work, Krone got excited, and very shortly flew up to Bethpage to see
what was going on. I heard Krone tell this story, I think at a local Long Island AIAA Section
dinner meeting. So the wheels were set in motion.
Meanwhile, some technical activities had begun. Because the Grumman HiMAT model had
variable sweep wings, it was fairly easy to make a wind tunnel model with the wings swept
forward, and they put this model in the Grumman low speed tunnel. This allowed a quick look to
see if anything terrible happened to the aerodynamic characteristics. The tests showed that there
were no obvious showstoppers.
Glenn now had a team of a designer and one aero guy working on the concept in preliminary
design, and was working with Krone to get money to do some studies. This was happening
without a formal forward swept wing concept being part of anybody’s strategic plan at
Grumman. I think the Grumman attitude was that if somebody was interested in this in the Air
Force, then they should take a look. I don’t think the Air Force had forward swept wings in the
plan either, but Krone wanted to see something come out of his PhD work, and became a
champion of forward swept wings in the Air Force. He was also working on relocating to
DARPA at about this time.
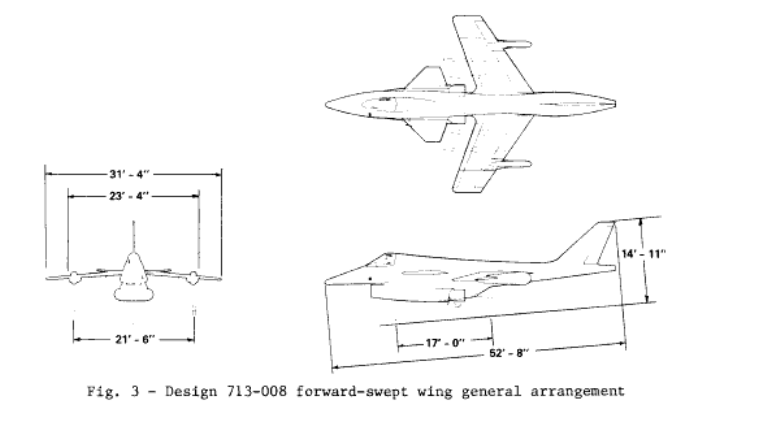
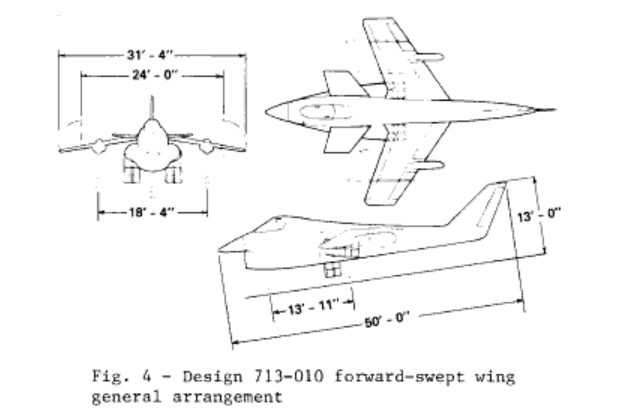
Figure 3 is a copy of a viewgraph made by Nathan Kirschbaum to establish a concept to start
development. There were some questions about how exactly this concept should be set up. The
landing gear don’t integrate as well as they do on an aft swept wing concept.
I got involved at this point. I had just finished working on a transonic CFD project for the Air
Force so it must have been 1977. It turns out that I had attended the Vortex Lattice Utilization
Workshop at Langley in 1976, where I heard John Lamar give a talk on turning his vortex lattice
analysis code into a design tool for wing-canard configurations, and the code contained the
option to trim the configuration. This was a purely subsonic method, and we already had the
code. But, we needed to consider transonic maneuver conditions, where the airfoil performance
would be an important issue, as well as the induced drag. I proposed adding transonic airfoil
section characteristics to Lamar’s induced drag calculation as a way of finding out how to
minimize induced plus profile drag for canard wing configurations. The section head of
aerodynamics didn’t think this was worthwhile and wouldn’t look for a charge number for me to
do this. I don’t exactly recall how it happened, but Glenn Spacht needed to be able to do this, and
he came up with a charge number. I think I had demonstrated how this would work by doing a
“model problem” without authorization, a somewhat time-honored way that Grumman technical
folks used to show managers the value of the work they refused to authorize. Often this approach
paid off.
Figure 3. The notional starting point for a forward swept wing airplane (Nathan Kirschbaum did
this sketch, but Russ Negri was the designer and his name is on the patent).
Next, to get to the end of the story, we need to review the airfoil work. In the early 1970s,
Whitcomb’s supercritical airfoils had generated a lot of interest in obtaining increased
performance using advanced airfoil designs. Grumman had an internal IR&D program, and had
designed some advanced airfoils. Bill Evans, who eventually became the Grumman tech rep at
Dayton when he didn’t get the Chief of Aero job, was the key proponent. They were using the
hodograph method developed at NYU as a computational tool, and hired Dave Korn from NYU
as a consultant, since the hodograph method was notoriously hard to use. Jameson had also just
developed his circle plane transonic full potential analysis code, FLO 6, and basically used that
as a resume to get another job. He joined Garabedian’s group at NYU, where he could take the
train to work and not sell his house (eventually he moved to Princeton). These airfoils required
that the boundary layer effects be included from the beginning. Before that time, boundary layers
were more closely associated with hypersonic viscous effects and heat transfer, and engineers
who knew about boundary layers had been in the Thermodynamics Section at Grumman. When
Grumman lost the space shuttle proposal to Rockwell most of these engineers were laid off.
That’s why I was brought over to the aero group, having just done a thesis on shock wave
boundary layer interaction. To include viscous effects in transonic analysis, NASA and
Grumman had Paul Bavitz spend a year at Langley, where he worked closely with Whitcomb.
Paul never quite understood why Whitcomb, a notorious loner, spent so much time with him.
Paul added a boundary layer calculation to an inviscid transonic analysis code to use in transonic
airfoil work (NASA TN-D-7718, it’s not available as a pdf). Whitcomb could now do design
work computationally rather then in the wind tunnel. Paul came back to Bethpage somewhere
around 1975. Then Charlie Boppe went down to Langley to work on a 3D transonic calculation.
Meanwhile, Whitcomb was also paying the NYU folks to make an analysis code and include
viscous effects. The so-called Bauer-Garabedian code was a very widely used code in its day.
Figure 4 shows the progression of airfoil designs at Grumman up to the HiMAT proposal.
The proposal was submitted with the “E” airfoil, although work continued. The 2D design Mach
number at that time was always M = 0.683. From simple sweep theory, this implies that for a
flight Mach number of 0.9, we were assuming a wing sweep of about 40 degrees. To get a 3D CL
of 1.0 we needed a 2D CL of 1.70, and a 2D t/c of 0.065 was used. The A airfoil came from the
hodograph method, transonic similarity scaling was used to get the right thickness (airfoil B),
and aft camber was used to increase the CL (airfoil E). The E got a CL of 1.25, so it didn’t meet
the CL requirement. Note that these plots appear to have come from the old real ink on graph
paper days of a Calcomp plotter. Charlie Boppe may have done this work.
Airfoil design work continued, and they got to airfoil “K”. Figure 5 shows this airfoil, the
pressure distribution and the drag performance. This airfoil is completely beyond any existing
airfoil performance for transonic high lift. Note the high degree of aft camber, the relatively
weak shock, and the large amount of lift carried on the lower surface because the airfoil has such
a low t/c. I’m not sure which analysis code was used to generate the predictions. Also, the
porosity of the tunnel had been adjusted to produce experimental results that matched Bavitz’s
pretest predictions (WT wall interference is always an issue with transonic resting, particularly in
2D)! The other issue with this airfoil is that every Grumman aerodynamicist felt the need to
“improve” it, so that there were many variations. I think the airfoil that was used on the X-29
was known as K-Mod 2. I’m not sure anybody can say with certainty what the actual airfoil
coordinates are. Grumman was not good with documentation.
The other issue is that for swept tapered wings, it was found that simple sweep theory
couldn’t be used to put the airfoil in the wing, and so-called “bowed” airfoil theory was used.
Our attached flow wing design work was aimed at keeping straight, well-behaved isobars. This
was similar to something employed by Northrop on the X-21 that they called “arc chord”
airfoils.* Straight isobars were critical for them because the suction slots needed to work against
a constant external pressure. Various aerodynamicists at Grumman had their own ideas of the
proper derivation of bowed airfoil theory, so that when they specified the streamwise airfoils to
the lofting group, there would have been variations on the actual streamwise contour relative to
the 2D airfoil.
Figure 4. Grumman airfoil design progression (Boppe’s internal tutorial presentation)
Figure 5. Airfoil K, as used in the Grumman X-29 (also from Boppe)
We can now describe how the X-29 forward swept wing– canard arrangement led to the airplane
being 35% unstable. Basically, The problem is to get as much attached flow lift as you can out of
the configuration. The drag penalty for a non-elliptic spanload is small compared to the penalty
from airfoil separation. This leads to a move away from elliptic spanloads to constant section CL
spanloads, with every wing station working the airfoil to its limit. The way to do this was to use
John Lamar’s existing code to minimize induced drag as a starting point. To minimize induced
drag you have a Lagrange multiplier problem that is linear, with the Lagrange multipliers being
the constraints on lift and pitching moment.* I wanted to minimize induced plus profile drag. If
you specify the airfoil section polar across the span, it amounts to adding a new term on the
diagonal and possibly something on the RHS of the equations. If the airfoil drag polars are
parabolic, then the problem is still linear. From Figure 5 you can see that the airfoil drag polar is
definitely not parabolic. After Lamar’s program was modified, the airfoil polar was input as a
table, and interpolated. This led to an iterative solution, is far from elegant, but works. You get
the minimum induced plus profile drag and also the associated spanload.*
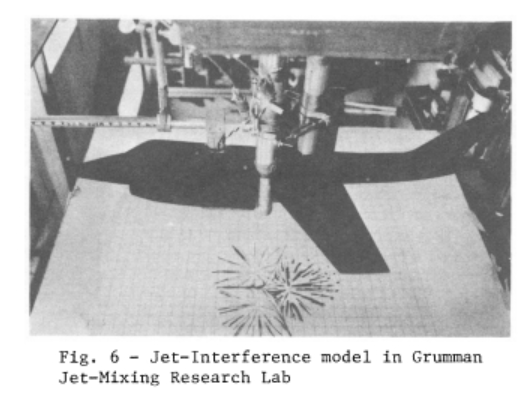
Figure 6 shows how for a single planform the spanload changes from an elliptic spanload
concept to constant section CL concept as the design lift coefficient increases. The solution
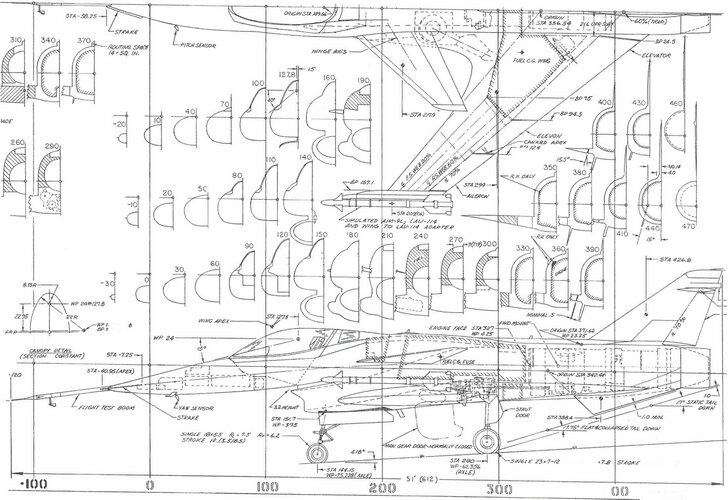
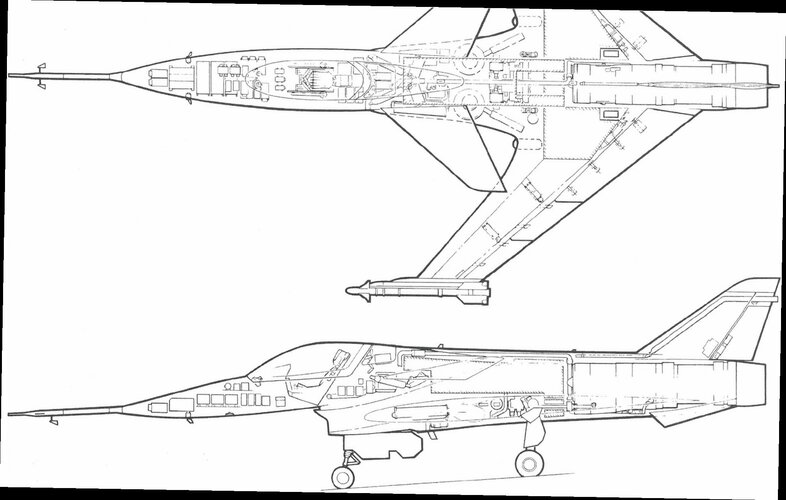
avoids the rapid profile drag increase shown in Fig. 5. Figure 7 shows the final X-29 concept,
and Fig. 8 shows how important selecting the proper cg location is to minimize trimmed drag.
The results of the calculations make it clear that to gain an advantage for forward sweep the
plane has to be highly unstable. The aft strakes and inboard kick on the wing leading edge were
added after my initial analysis. The inboard kick was added for the structures folks. The aft
strake helped with the nose down pitching moment at high angle of attack, and led to the plane
being 32% unstable rather than the original 35% unstable, something some of the NASA folks
made into a big deal. Anyway, after trying to find other arrangements that worked without this
degree of instability, I went to Spacht and said that it looked like the forward swept wing was not
practical. He then talked to Arnold Whittaker, who unbeknownst to me had been the controls guy
on the lunar lander. Arnold told Glenn: “No problem.” So they continued on. Other work was
going on with the aeroelastic tailoring design, leading to a successful test at NASA Langley
demonstrating that a composite forward swept wing would work structurally. Thus, the
aerodynamics were pretty much set, the structural design concept was pretty much set, and the
development program transformed itself into one of flight control system design, with many
hours of overtime going to those guys. Initial discussions of making the first flights with a stable
configuration just didn’t make sense (the canard CL on stable canard configurations is very high,
not to mention the nose-wheel lift off problem), and so it always flew with the highly unstable cg
location.
The X-29 is an excellent example of how to integrate an airfoil design into a planform to
achieve the full benefit of an aft-loaded supercritical airfoil on a high-lift configuraiton. If you
have a strong aft shock, you have no other choice.
I’m writing this down after 30 years, there are some other tidbits that deserve to be noted:
- Canard-wing interaction helps wing twist on forward swept wings. On an aft swept wing canard
concept, the washin at the root has to be increased when the canard downwash unloads
the inboard wing. Just the reverse is true if the wing is swept forward because the wing twist is
down to unload the root. The canard downwash means that you don’t need to twist down as much.
- The forward swept wing configuration means that within the Mach cuts the configuration actually
“contracts”, so that the fineness ratio is effectively reduced. This is definitely not a way to get low
supersonic wave drag. I never understood Rockwell’s claim of lower supersonic wave drag.
- Effectively, the forward swept wing allowed the structural sweep to be lower than the aero sweep.
This is a big weight savings, and another big benefit of forward swept wings.
- The camber shown in Figure 5 was the maneuver shape. The shape was obtained using a
two-element trailing edge flap arrangement. For the uncambered cruise shape this resulted in two
non-smooth “humps”. We called this “discrete variable camber”. Ironically, because the trailing
edge was also scheduled as part of the flight control system, and the controls were “fast”, and the
maneuver deflection was “slow”, the full camber wouldn’t be achieved if the maneuvers were fairly rapid.
- Programatically, NASA Langley was continually negative, wanting something like a 10
year development program. DARPA wouldn’t let them do this. Although we delivered the plane
with Grumman painted on the tail, NASA took this off (eventually a smaller Grumman got back
on the plane). I made the X-series airplane chart that’s on my web site originally to show
Grumman management the long odds of converting an X-series airplane into a money maker.
Also, in the years leading up to the ATF competition some Air Force friends continually told me
that the Air Force wasn’t interested in a forward swept wing airplane. I relayed the information,
but obviously I was ignored.
- Possibly the best paper to read is by Mike Moore and Doug Frei: AIAA 83-1834. Spacht also has
a couple of papers on the AIAA web page: AIAA 80-1885 and 86-2630.
Figure 6. Single planform section minimum total drag distributions (AIAA Paper 82-0097).
Figure 7. The final X-29 concept. (from Jay Miller’ X-series book). Note the nose strakes to suppress high alpha asymmetries.
There are plenty of other parts to the story, but this is the part I was involved in, and can tell. Not
long after I finished this work, I was pulled off the forward swept wing project to work on a
concept called SuperCritical Conical Camber, or SC3, intended to apply transonic concepts to
supersonic maneuver. This was definitely an aft swept wing concept. Grumman’s chief of aero
never thought Krone would find the money to build the forward swept wing airplane. He thought
the canard wing concept shown in Fig. 9 was what the company should be pursuing. SC3 is
another story (AIAA Paper 83-1858). The company went on to win a competition that included
Rockwell and General Dynamics to build the X-29. They completely ignored stealth during this
time, simply paying lip service to it, but not really thinking it was real. Charlie McLaughlin
became the project aero on Grumman’s VTX proposal. This was the program that led to the T-46
Goshawk. We had a team of Beech and the Link Trainer folks, and thought this was a real “mom
and apple pie” team for the navy. A story that may or may not be true is that Reagan and
Thatcher got together and decided to modify the Hawk for the Navy trainer. At any rate, this loss
was really the end for Grumman as prime airframer, although it took many more years for
everything to play out.
Figure 8. Total drag variation with static margin – why the X-29 had to be highly unstable.
(AIAA 82-0097 and my COMSAC Paper in NASA/CP2004-213028/PT1)
Figure 9. The Grumman Research Fighter Configuration (RFC), a joint program with NASA
Langley, it had its own problems. The NTF model cost $600K and was never tested!

")