NASA SP-4021
ASTRONAUTICS AND AERONAUTICS, 1976
A Chronology
1976 October:
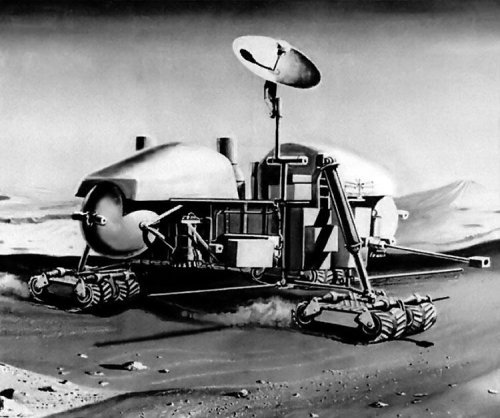
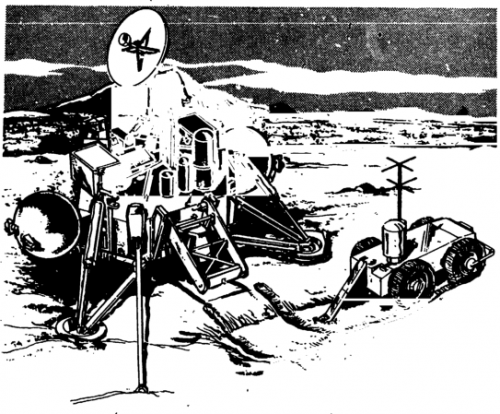
"MSFC announced development of a new system of vehicle mobility that could greatly extend unmanned explorations on the surface of Mars and other planets. The concept grew out of work on the successful lunar roving vehicle that carried astronauts and equipment on extended exploration of the moon, far from the lunar module as landing site. Scientists had regretted the lack of mobility of the Viking landers on the surface of Mars, because the data on atmosphere and terrain had been limited to the landing site. The new idea, called Elastic Loop Mobility System (ELMS), would use a continuous elastic-loop track in place of the landing pads; the track would distribute lander weight uniformly over a relatively large area, with suspension and drive systems on the spacecraft combined into a single lightweight package. The geometry of the loop would serve to provide "excellent mobility" on soft soils and smooth rides over hard and rough terrain. Tests on models revealed slope-climbing capability, high maneuverability, and power to surmount obstacles and cross crevasses. Combining the ELMS with existing Viking hardware would produce a mobile laboratory that could conduct scientific missions on the Mars surface for 6 mo along traverses up to 150 km.
Recent reviews of a possible mobile-Viking mission to Mars, using the ELMS concept, considered extending the mission to 2 yr along traverses up to 500 km. The low ground clearance of the Viking spacecraft, together with the low ground-pressure tolerances on soft Martian soil, ruled out the use of wheels for mobility, as well as the use of conventional tracks because of high energy consumption and low operational reliability. Besides use of the MSFC-developed ELMS for planetary exploration, the U.S. Marine Corps had considered the system for a new generation of amphibious landing vehicles for the 1980s, a MSFC spokesman said. (MSFC Release 76-191)"
hdl.handle.net/2060/19840017534






")