Sukhoi Unveils Modified S-71 Attack UAV Concepts | Aviation Week Network
The Russian aircraft manufacturer is pursuing attack and logistics UAV concepts that have evolved because of the war in Ukraine.
 aviationweek.com
aviationweek.com
Sukhoi has received approval from the Russian Defense Ministry to begin producing the S-71 air-launched UAV, which has undergone significant design changes based on lessons from the Russia-Ukraine conflict. There are two versions of the S-71: the S-71K "Kovyor," which operates like a guided air-to-ground missile, and the more advanced S-71M "Monokhrom," which is an autonomous UAV.
The design changes to the S-71 have focused on increasing range and reducing radar cross-section to improve survivability against air defenses. The original multimission design was simplified for easier mass production. The S-71 began captive-carry trials in April 2024 at Russia’s flight research center in Zhukovsky, with test flights involving the Su-57 fighter.
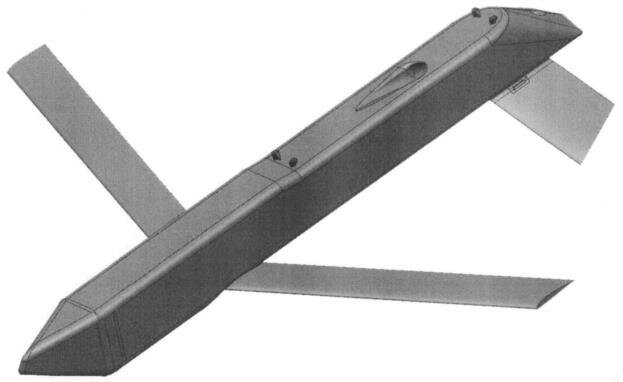
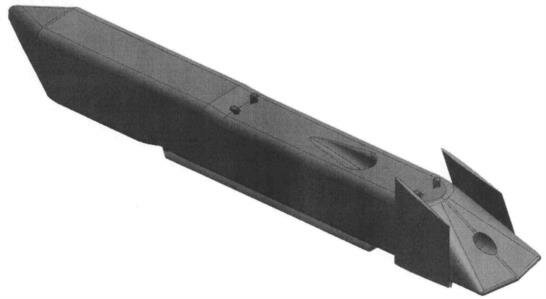
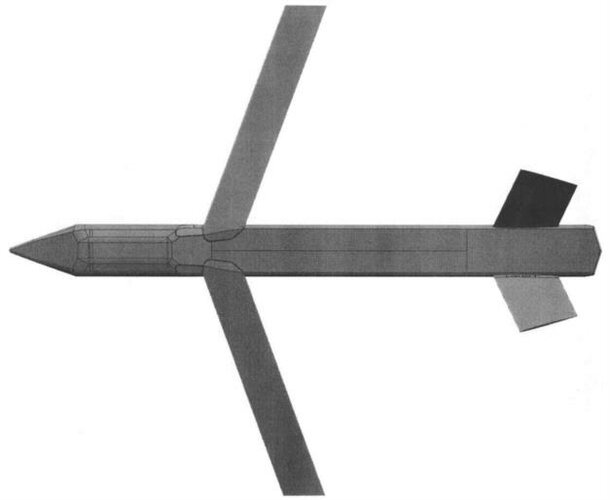
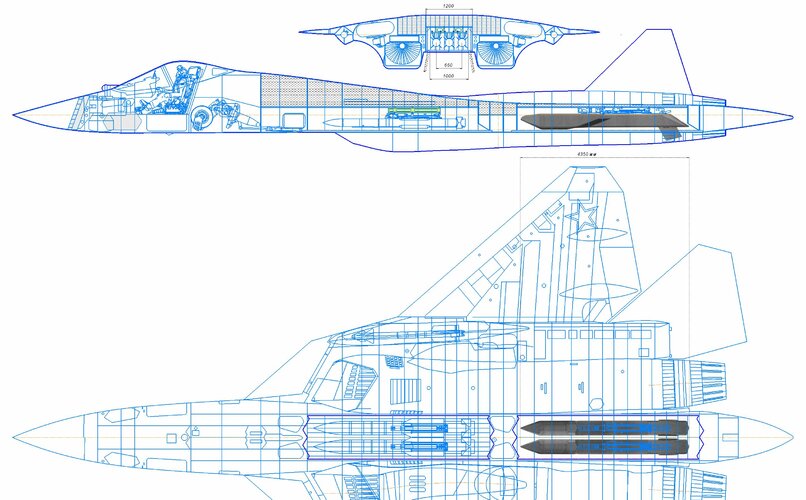
The S-71 has a trapezoidal fuselage for stealth, a foldable swept wing, and inverted V-shape fins, powered by a TRDD-50 turbofan engine. It can reach speeds of Mach 0.6 and altitudes of up to 8,000 meters.
The S-71K deploys cluster munitions, while the S-71M features electro-optical sensors for day and night operations, with capabilities for target detection and engagement. The S-71M can be guided by an operator to validate targets or guide weapons. It offers multiple warhead options, including high-explosive and shaped charges. The S-71K is externally carried by launch aircraft, while the S-71M can also be housed in the weapons bay of an Su-57 or S-70 Okhotnik UAV.