- Joined
- 25 June 2009
- Messages
- 14,107
- Reaction score
- 4,239
From the Postwar topic: http://www.secretprojects.co.uk/forum/index.php/topic,2693.msg21687.html#msg21687
Ah, but what about Papin & Rouilly's improbable 1914 machine?
In your post, the term "gyroptère" (gyropter, I suppose, in English) sounds more like a marketing ploy here than the depiction of a distinct technology.
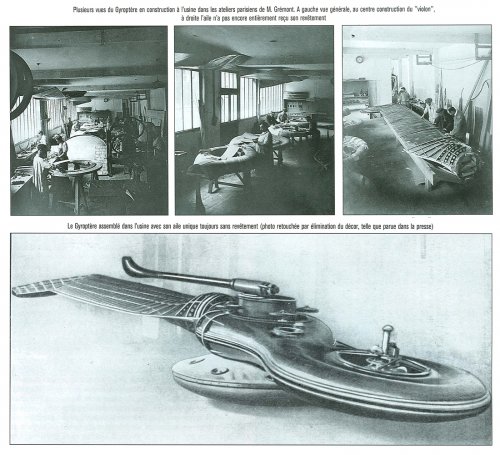
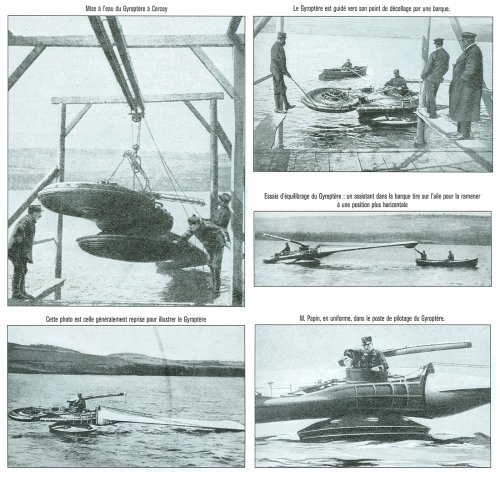
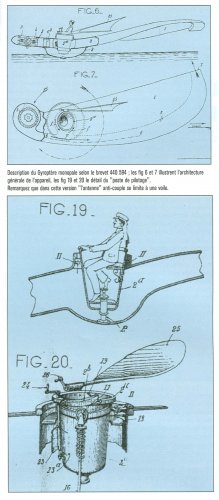
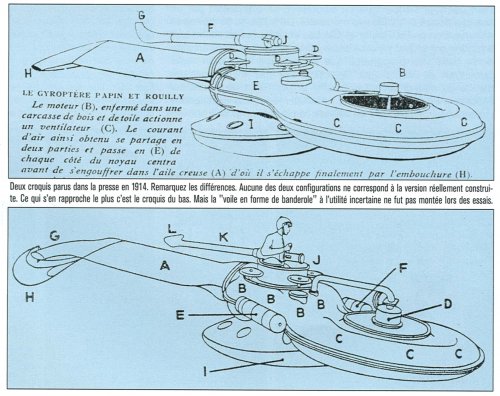
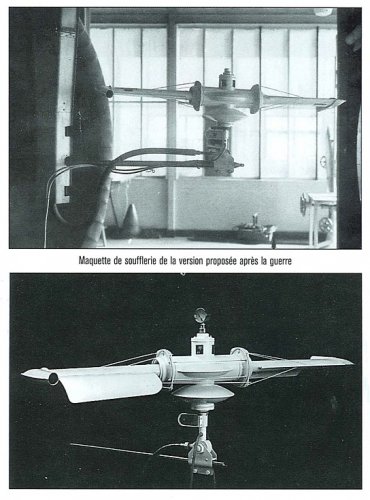
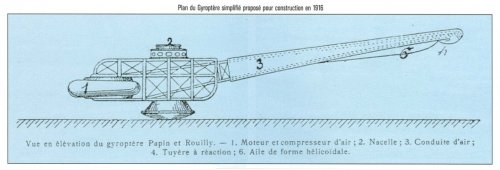
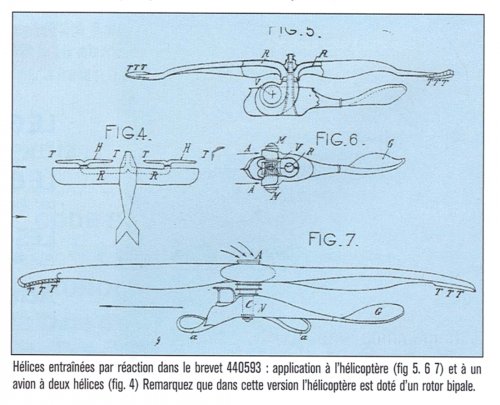
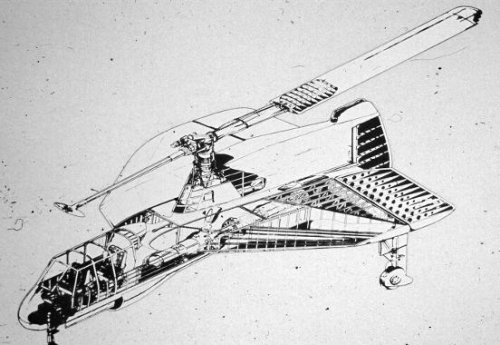
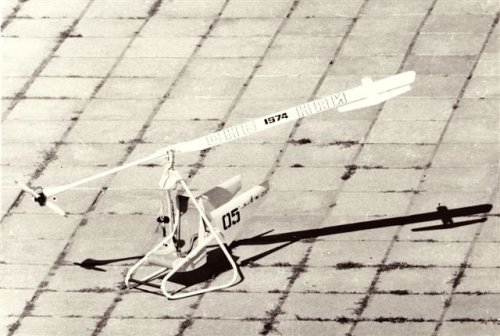
But when Messrs. Papin & Rouilly designed and built their first gyropter, the "Chrysalide", it was... something else!
Check these pics which I gathered from an excellent article published in Air Magazine 30 (a publication which I warmly recommend):
Jemiba said:They are Gyropteres, not helicopters, as explicitly is said, although I think, this designation was used for several different types of rotary wing aircraft.
As inventors Louis Breguet, Marcel Vullierme (working from 1927 to 1967 for Breguet) and Maurice Chartier are mentioned.
Ah, but what about Papin & Rouilly's improbable 1914 machine?
In your post, the term "gyroptère" (gyropter, I suppose, in English) sounds more like a marketing ploy here than the depiction of a distinct technology.
But when Messrs. Papin & Rouilly designed and built their first gyropter, the "Chrysalide", it was... something else!
Check these pics which I gathered from an excellent article published in Air Magazine 30 (a publication which I warmly recommend):