Planning studies for future space exploration activities have shown requirements for small, manned, utility spacecraft capable of a high degree of versatility and maneuverability.
These vehicles, designated Independent Manned Manipulator Units (IMM) possess greater functional versatility, longer range and mission duration, increased maneuverability and superior support capability than do conventional back pack maneuvering units or similar individual maneuvering devices. Many of these additional attributes are due to their support load-carrying capability and their ability to maneuver while carrying such loads. This maneuvering capability is obtained by providing attitude stabilization and a six-degrees-of-freedom. reaction control system.
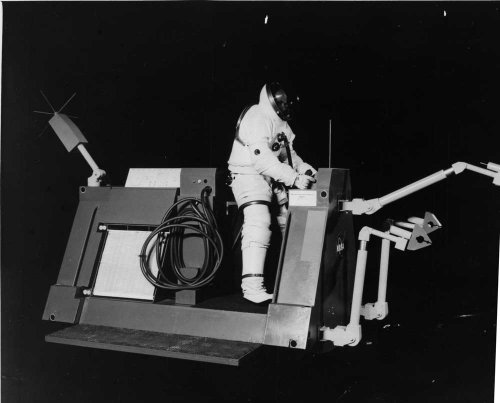
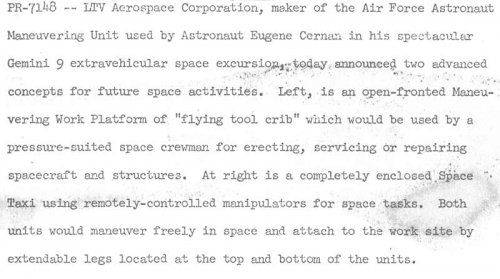
Two such devices were studied in detail under the recently completed Contract NAS8-20316, entitled Definition of Experiment Program in Space Operations, Techniques and Subsystems (Independent Manned Manipulator- IMM), Reference (1). One such device, the Maneuvering Work Platform (MWP), shown in Figure 1, is an early availability concept consisting of an open structure, which is operated by a pressure-suited astronaut.
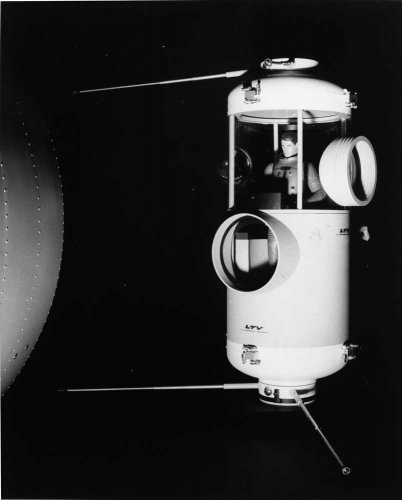
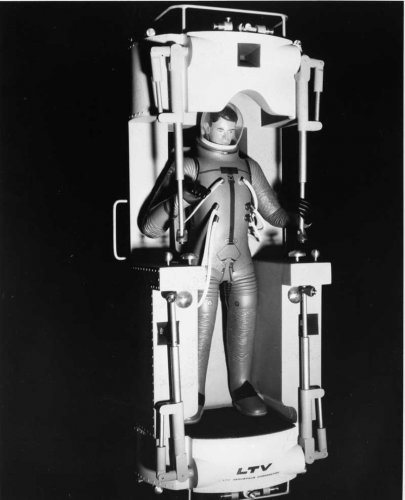
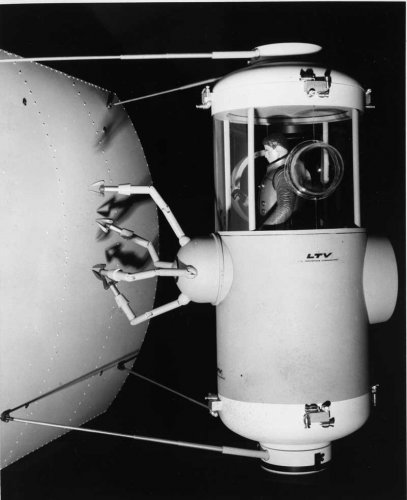
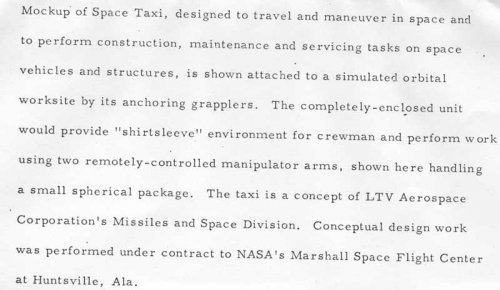
This concept is essentially a maneuverable workshop, with self-contained power, propulsion, attitude stabilization, and environmental control/life support system. It carries a full complement of tools and spare parts for orbital servicing and maintaining of other vehicles. The second, more advanced concept, shown in Figure 2, is the Space Taxi, which features complete, environmentally controlled encapsulation of the astronaut. The latter provides the capability of performing maintenance tasks in a shirtsleeve environment by means of bi-lateral master-slave manipulators controlled from within the pressurized cabin. Both of these small utility spacecraft embody remotely operated grapplers or master-slave manipulators, controllable by the crewman, for docking and anchoring his vehicle to various cooperative and uncooperative space objects.