- Joined
- 25 June 2009
- Messages
- 14,749
- Reaction score
- 6,112
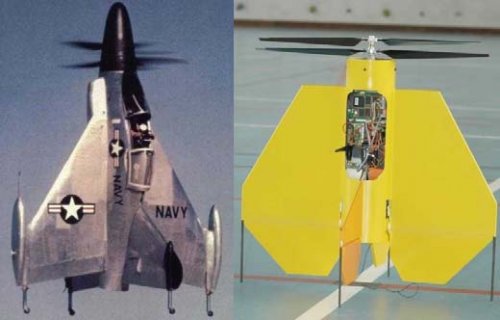
A French MAV allegedly inspired by the Convair XFY-1 VTOL fighter prototype...
Source:
Development of a VTOL mini UAV for multi-tasking missions
http://www.raes.org.uk/pdfs/3325_Colour.pdf
Jean-Marc Moschetta, one of the authors, was also event coordinator of a very interesting US-American MAV competition in 2007, which was organized by prominent engineering schools such as SUPAERO, ENSICA or ENAC as well as national research agencies CNRS and ONERA, with judges from the USA, Japan, the UK, Russia and of course France.
http://aeromav.free.fr/MAV07/award.htm
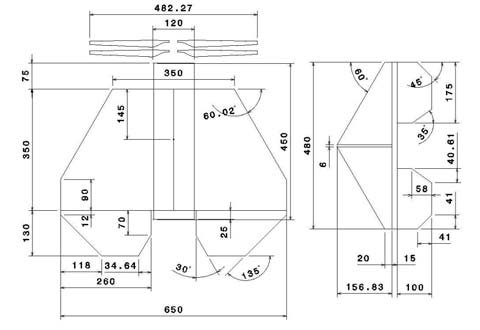
Vertigo is a VTOL mini-UAV prototype developed at ISAE in order to demonstrate a fixed wing MAV capacity to achieve autonomous transition between hover and fast forward flight. It was designed and built at the Aircraft Design Department of ISAE based on a successful early prototype which could perform transition and stable flight in manual mode. The source of inspiration for this aircraft is the Convair XFY-1 Pogo prototype (Fig. 1). The airframe consists of two flat plate wings of which polygonal planform approximates the inverse Zimmermann wing and two vertical fins that are symmetrically placed on either side of fuselage. Twobladed contra-rotating propellers are mounted in tractor configuration. It is fitted with two large flaps on each wing to ensure enough control efficiency in hover. Although each propeller is powered by its own electric motor, the choice has been made to apply the same throttle to both motors. The wingspan is 650mm and the propeller diameter 500mm (Fig. 2). All the hardware is fitted inside the cylindrical shaped fuselage. The prototype mass is m = 1·6kg fully equipped and its centre of gravity lies 145mm behind the leading edge.
[...]
A complete study about the Vertigo VTOL tail-sitter mini-UAV has been carried out. Aerodynamic and propulsion effects have been measured in a low-speed wind-tunnel and a full longitudinal flight model valid up to the stall angle has been developed for the simulation of transition. In particular, a simple but realistic propwash model has been adapted and used to describe the transition mechanism. The equilibrium analysis proved the feasibility of performing transition with the Vertigo prototype with the introduction of the effective wing angleof-attack αw. The flight model has been used to design control laws and analyse stability issues. Finally a control design based on a gainsequencing technique and commutation was used with the assumption of a good knowledge of the dynamic behaviour during transition. Simulation of transition under automatic control has been proposed in view of preparing future flight tests experiments.
Source:
Development of a VTOL mini UAV for multi-tasking missions
http://www.raes.org.uk/pdfs/3325_Colour.pdf
Jean-Marc Moschetta, one of the authors, was also event coordinator of a very interesting US-American MAV competition in 2007, which was organized by prominent engineering schools such as SUPAERO, ENSICA or ENAC as well as national research agencies CNRS and ONERA, with judges from the USA, Japan, the UK, Russia and of course France.
http://aeromav.free.fr/MAV07/award.htm