
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
European UGV/UGCVs (unmanned ground combat/vehicles)
- Thread starter muttbutt
- Start date


shin_getter
ACCESS: Top Secret
- Joined
- 1 June 2019
- Messages
- 1,010
- Reaction score
- 1,328
Not sure how this category of vehicles should be used, even though it has appeared popular enough to be tested by the Russians (Uran-9) and Americans (RCV-Medium) as well.
The above vehicle appears to big and expensive to be recon/screen. Flying sensors seems generally a better investment than land ones, especially one that may not be able to get enough bandwidth to make use of the sensors. (I don't think autonomy is in the near future for this category) Long range indirect fires seems generally a better investment in fire support. If you have bandwidth to operate a RCV you have enough to run a battle network to call in fires.
For infantry support vehicles, compact size and terrain crossing ability is likely more important than marginal improvements in firepower and armor.
The above vehicle appears to big and expensive to be recon/screen. Flying sensors seems generally a better investment than land ones, especially one that may not be able to get enough bandwidth to make use of the sensors. (I don't think autonomy is in the near future for this category) Long range indirect fires seems generally a better investment in fire support. If you have bandwidth to operate a RCV you have enough to run a battle network to call in fires.
For infantry support vehicles, compact size and terrain crossing ability is likely more important than marginal improvements in firepower and armor.
shin_getter
ACCESS: Top Secret
- Joined
- 1 June 2019
- Messages
- 1,010
- Reaction score
- 1,328
You are giving them many videos of blown up tanks and much allah akbar, probably increasing recruitment significantlyPatrolling a hostile asymmetrical border seems to be a good application.
For ex, say, along the border with Hizbullahstan...
A large vehicle like this is practically blind and blundering relative to UAV equipped infantry with any skill, and terrain crossing limits give infantry many safe areas. Patrols patterns will get figured out and ambush points setup.
Now, weakness can be filled up with combined arms tactics, but it is unclear what this vehicle adds to a existing force. An drone ISR artillery/strike complex have little use for tanks. A mechanized infantry already have IFV for the role, and increasing the armor protection for the vehicle should have greater utility than adding extra medium weight vehicle, as protection of the human is of a greater issue than equipment counts to limits in direct firepower.
If we are maneuvering in the medialized conflicts, having equipment that looks more impressive than its capability is bad, as it just discredits yourself, lowers your own morale while increases that of your opponents when the combat footage inevitably gets broadcasted. It is much better to have "harmless" looking equipment do the fighting that lets you control the narrative. (terrorists broke our peaceful observation vehicle blah blah)
- Joined
- 3 September 2006
- Messages
- 1,432
- Reaction score
- 1,354
So are obviously so much smarter than the whole IDF combined that there is nothing to say.
Maybe you want to be kind and send them a memo explaining why they are so completely wrong.
Maybe you want to be kind and send them a memo explaining why they are so completely wrong.
Attachments


shin_getter
ACCESS: Top Secret
- Joined
- 1 June 2019
- Messages
- 1,010
- Reaction score
- 1,328
A 1 ton wheeled vehicle that operates largely unarmed is quite different from a 12ton vehicle tracked vehicle with autocannon and ATGM tubes.
The Guardium UGV was not designed as a combat vehicle, but as attritable early warning, with the hostiles dealt with by other forces. This is different from a UGV packed with armor and weapons whose use case is unclear.
The Guardium UGV was not designed as a combat vehicle, but as attritable early warning, with the hostiles dealt with by other forces. This is different from a UGV packed with armor and weapons whose use case is unclear.
aonestudio
I really should change my personal text
- Joined
- 11 March 2018
- Messages
- 2,866
- Reaction score
- 7,062
The Rheinmetall Mission Master is a unique family of Autonomous Unmanned Ground Vehicles (A-UGVs) designed to support military troops in dangerous missions, difficult terrain, and hostile weather conditions. On top of being valuable for reconnaissance and surveillance operations, the Mission Master platforms can be fitted for tactical overwatch, fire support, medical evacuation, CBRN detection, communication relay, and any other type of missions that may require the support of an A-UGV.
Each Mission Master vehicle is already networked with both Rheinmetall’s soldier system and the Rheinmetall Command and Control Software, which are compatible in any user’s battle management system.
View: https://www.youtube.com/watch?v=y5exKJD_n9o
 rheinmetall-defence.com
rheinmetall-defence.com

 defence-blog.com
defence-blog.com
Each Mission Master vehicle is already networked with both Rheinmetall’s soldier system and the Rheinmetall Command and Control Software, which are compatible in any user’s battle management system.
Rheinmetall
Rheinmetall Mission Master is a unique family of Autonomous Unmanned Ground Vehicles to support military troops in dangerous missions with difficult conditions.
rheinmetall-defence.com
German defense group unveils new autonomous platform
German weapons maker Rheinmetall unveiled its new autonomous platform, called the Mission Master XT. The new platform is the latest member of the Rheinmetall Mission Master family of Autonomous Unmanned Ground Vehicles (A-UGVs). Named for its ability to tackle extreme terrain, the Mission Master...
Last edited:
shin_getter
ACCESS: Top Secret
- Joined
- 1 June 2019
- Messages
- 1,010
- Reaction score
- 1,328
I think "nonlethal" warfare packages UGV should be developed, with systems fulfilling following roles:
1. Non-lethal human take down/immobilization. Don't want suicide bombers or crazy people induced attrition.
2. Mobile road blocks to cut off VBIED
3. PIT maneuver capability (incapacitate moving vehicles by pushing them)
4. Vehicle scanner (X-Ray, explosives, other penetrating sensors)
5. Crowd dispersion
and so on....
Why? I remember reading about the Syrian civil war, and how the Syrian army collapsed after they were employed to control the country via road blocks as opposed to the conservative tactic of raiding opposition hideouts. Roadblocks are easy targets to attack and the poor trained Syrian forces simply could not hold when deployed as such.
It is this kind of irregular warfare that I believe UGV can generate the greatest value, as no other asset category can apply such precisely controlled "force," not even the infantryman (self preservation and difficulty of human resources). The poor infantryman can get forced into impossibly roles, like dealing with protesters that have snipers in mixed while "not to shoot back." Then there is getting into fist range to inspect unknown vehicles that could have a literal ton of explosive inside.
The ability to use non-lethal force makes it feasible to apply force against far more targets with a less than ideal error rate. The use of unmanned systems also makes mistakes far less costly to your own forces.
Projectile "non-lethal" weapons really often is no such thing, as it generally merely "less lethal." A UGV however? One can design manipulators with careful ergonomic design that minimize injury while maximizing immobilization capabilities.
This robot knows judo~
1. Non-lethal human take down/immobilization. Don't want suicide bombers or crazy people induced attrition.
2. Mobile road blocks to cut off VBIED
3. PIT maneuver capability (incapacitate moving vehicles by pushing them)
4. Vehicle scanner (X-Ray, explosives, other penetrating sensors)
5. Crowd dispersion
and so on....
Why? I remember reading about the Syrian civil war, and how the Syrian army collapsed after they were employed to control the country via road blocks as opposed to the conservative tactic of raiding opposition hideouts. Roadblocks are easy targets to attack and the poor trained Syrian forces simply could not hold when deployed as such.
It is this kind of irregular warfare that I believe UGV can generate the greatest value, as no other asset category can apply such precisely controlled "force," not even the infantryman (self preservation and difficulty of human resources). The poor infantryman can get forced into impossibly roles, like dealing with protesters that have snipers in mixed while "not to shoot back." Then there is getting into fist range to inspect unknown vehicles that could have a literal ton of explosive inside.
The ability to use non-lethal force makes it feasible to apply force against far more targets with a less than ideal error rate. The use of unmanned systems also makes mistakes far less costly to your own forces.
Projectile "non-lethal" weapons really often is no such thing, as it generally merely "less lethal." A UGV however? One can design manipulators with careful ergonomic design that minimize injury while maximizing immobilization capabilities.
This robot knows judo~
Last edited:
New Croatian DOK-ING Komodo CBRN UGV, funded by the EU PESCO.

 soldat-und-technik.de
soldat-und-technik.de

From German.The Croatian Unmanned Ground Vehicle (UGV) forge DOK-ING plans to continue the series of successful UGVs that can be used in practice with the Komodo. The vehicle, which was created with financial support from the European Structural and Investment Fund (ESI Fund), like its predecessors, is also designed for use in particularly dangerous environments and has a specialization for missions in a CBRN environment. The manufacturer DOK-ING, founded and based in Zagreb in 1992, is internationally known for its unmanned ground vehicles. The range of possible applications ranges from clearing mines to EOD and fire extinguishing tasks to monitoring rooms. Over a dozen armed forces have already introduced a Croatian-made UGV, including the US Army, where 41 MV-4 mine clearance systems are currently in use. The uranium-6 and uranium-14 UGVs used by the Russian armed forces are also based on the MV-4 and MVF-5 designed by DOK-ING. The Komodo now presented is part of the Permanent Structure Cooperation (PESCO) program and is to be offered as a uniform system for the countries of the European Union (with the exception of Malta and Denmark).
According to the manufacturer, the 7.2 m long and 2.3 m wide UGV, with a system weight of 17 tons, is one of the heaviest vehicles in this class. The drive still allows a cruising speed of up to 30 km / h. According to their own statements, the developers made a conscious decision in favor of a hybrid drive solution in order to be able to carry out missions in an atmosphere with a very low oxygen content. For the primary role of use in a contaminated atmosphere and polluted terrain, the Komodo is equipped with an extensive sensor package for the detection of ABC threats, which can be expanded modularly. In addition, samples of gases, aerosols or solids can be taken for later evaluations in laboratories in the field of application.Thanks to the combination of cameras and a LIDAR system, a comprehensive picture of the situation around the vehicle is available even with severely restricted visibility.
For this purpose, the Komodo has a multifunctional arm mounted on the rear, which, in its role as a crane, can lift loads of up to 900 kg with a range of 4 m. As a further function, the robot arm can carry out the decontamination of objects or vehicles. The integrated extinguishing agent tank can also be used to carry out fire-fighting tasks and also to cool the vehicle, as well as limited self-decontamination. A shower attached to the vehicle allows individual persons to be decontaminated. In addition, a clearing blade with an integrated gripper is installed on the bow. With the shield, the vehicle can move loads and barriers up to a weight of ten tons or lift up to two tons. In addition, soil can be removed to enable surfaces to be decontaminated. DOK-ING specifies the range for reliable radio remote control with an undisturbed line of sight as 1.5 km, which seems quite realistic. In addition, the vehicle has a follow me function to ensure cooperation with its own forces, as well as an AI-based obstacle detection.
According to the manufacturer, the 7.2 m long and 2.3 m wide UGV, with a system weight of 17 tons, is one of the heaviest vehicles in this class.
The Komodo has a multifunctional arm mounted on the rear, which in its role as a crane can lift loads of up to 900 kg with a range of 4 m. (Photo: DOK-ING) The DOK-ING Komodo is an interesting draft for a mission profile in which the use of one's own forces should ideally be reduced as much as possible to machines. With the partial self-decontamination capability, a weak point in automated detection and detoxification systems has also been addressed. Furthermore, it remains to be seen whether the Komodo will replace or just supplement the significantly lighter but also less powerful MVF-5 UGV from its own production. After all, on closer inspection, both vehicles show a clear overlap in their capabilities.
DOK-ING stellt neuen UGV Komodo vor - S&T - Soldat & Technik
Die kroatische Unmanned Ground Vehicle (UGV) Schmiede DOK-ING plant mit dem Komodo die Reihe erfolgreicher und in der Praxis nutzbarer UGV fortzusetzen.



The French MOD/DGA and a few private companies are working om a UGV mule/mobile hydrogen power point.
Translated from French

 www.forcesoperations.com
www.forcesoperations.com
Translated from French
Combining robotic mule and hydrogen propulsion is the challenge that two French companies have set for themselves with, in the viewfinder, possible outlets with the armed forces. A concept called "H2RMIONE" and the first links of which will be evaluated this year in the Moroccan sands.
From Bugs BuggHy to H2RMIONE
Pilot of the project, Robotics Industry is no stranger to the defense world. This Mérignac (Gironde) company notably designs the GX8 aerial drone, the Droneo autonomous surface drone and the Serval ground robot, reserved for military and security applications. It has also delivered a dozen firing analysis systems to French special forces and collaborates with Arquus for the robotization component of the Contact Lightening Machine (EAC).
The idea for the H2RMIONE mule has emerged over the past few months. To carry it out, Robotics Industry has joined forces with H2X-Ecosystems, a player in the new French carbon-free hydrogen sector. “ The idea is to come and combine their energy know-how with our mobility and autonomy elements to design an autonomous hydrogen mule ”.
Born in January 2020 from a merger between Eco Solar Breizh, SLS France and Anleg, H2X-Ecosystems “ develops both batteries and hydrogen tanks, more truly the entire ecosystem, ie manufacturing and distribution, ”explains Robotics Industry.
Recently, H2X-Ecoystems has also made progress in the hydrogen vehicle segment. Eco Solar Breizh came looking for him to jointly develop a buggy prototype, the Bugs BuggHy, which will be on display during the next Aïcha des Gazelles rally, from September 17 to October 2, 2021 in Morocco.
H2X-Ecoystems has already succeeded in designing a solution allowing hydrogen cylinders to be changed in less than 15 seconds. The Breton company will also supply its Shyva 350 generator, a containerized hydrogen generator to recharge the batteries and supply the bivouac.
The first laps of the wheels will take place in September. The Moroccan experience will then demonstrate the relevance of the concept, will help to test fuel cells in extreme environments and will fuel the H2RMIONE project. The first milestones could be reached in the next six months, estimates Robotics Industry.
If Robotics Industry masters autonomy and H2X-Ecoystems hydrogen fuel supply, the real challenge will be to “ progress in unknown terrain. We are working with other companies, other start-ups to capture technologies that could be missing ”.
Rather than adopting a civilian chassis, it will be a question of relying on the experience acquired previously on the basis of a small modular terrestrial robot. “ It is clear that we will move forward with the project with a very different modular chassis ,” says Robotics Industry.
" At Robotics Industry, we love to play with Lego bricks, whether they are hardware or software ." The team has been working for a while on a patented solution for integrating the propulsion unit into a mobility module. In other words, each wheel would have its own motor, powered by its own batteries. It is up to the user to connect the modules together to build a vehicle with 4, 6, 8 or even 10 wheels depending on the required use.
The targeted performances would surpass those of the Bugs BuggHy: up to 300 km of autonomy, a maximum speed of 80 km / h and 300 kg of load. All while maintaining a compact profile, the example taken by Robotics Industry as an illustration evoking a platform 3.2 m long, 1.3 m high and 1.85 m wide.
This mule would have a dual use, thereby going beyond the traditional range of missions entrusted to this type of tool, from transport to the surveillance of sensitive sites. Like the smart grid idea promoted by Arquus, the idea would be to make the vehicle an “energy terminal” for the infantryman, to whom he would connect to recharge the batteries of his equipment.
Still, H2RMIONE is only at the stage of reflection. To connect the idea to the needs of the French military, Robotics Industry very recently approached the Battle Lab Terre, the French Army's benchmark for land robotics. " We have started to discuss the subject, to determine with them what the scenarios could be ," notes the company.
H2RMIONE, le concept de mule à hydrogène qui lorgne sur la défense - FOB - Forces Operations Blog
Conjuguer mule robotisée et propulsion à hydrogène, c’est le défi que se sont lancées deux entreprises françaises avec, dans le viseur, d’éventuels débouchés auprès des forces armées. Un concept baptisé « H2RMIONE » et dont les premiers maillons seront évalués cette année dans les sables marocains.
www.forcesoperations.com



- Joined
- 3 June 2006
- Messages
- 2,964
- Reaction score
- 3,235
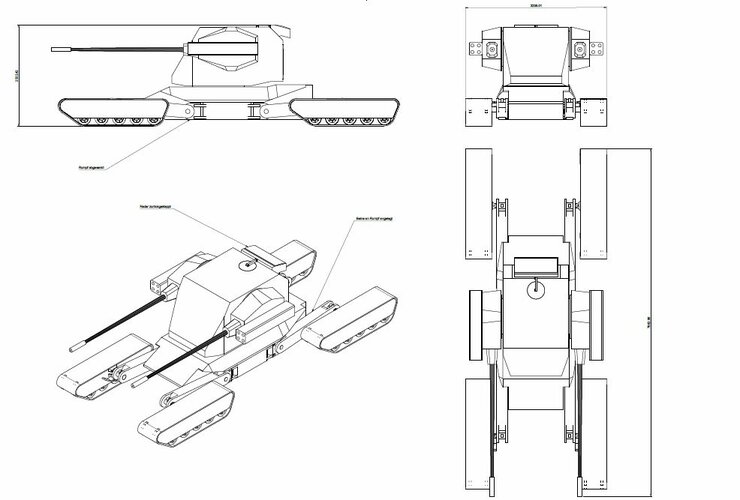
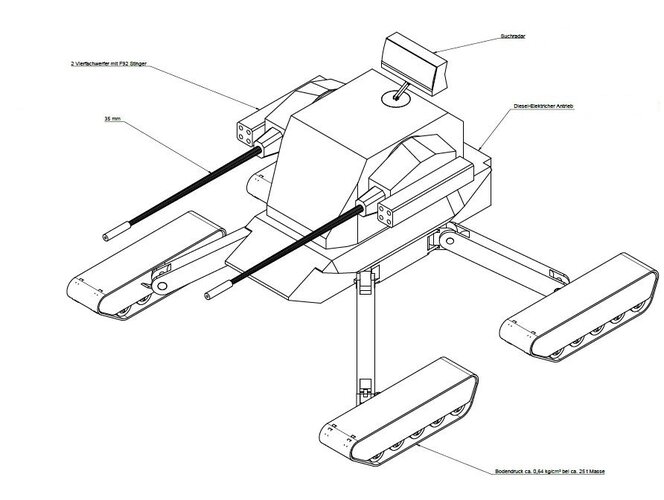
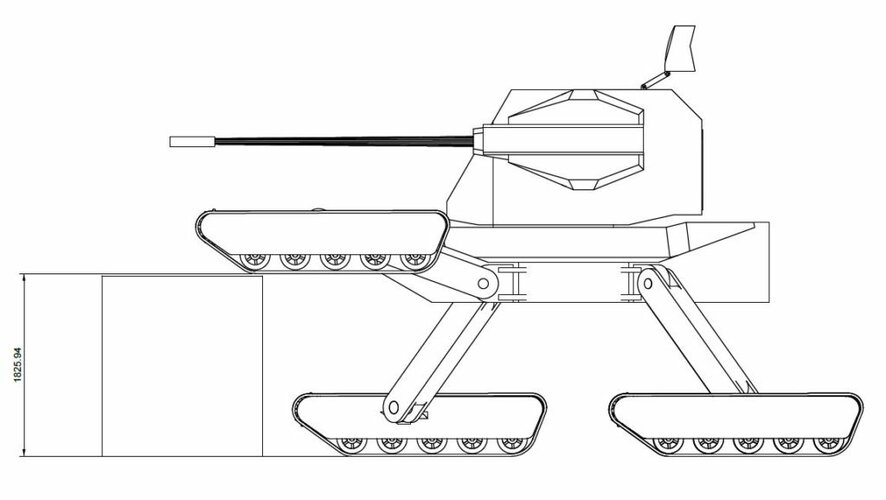
Last week the Germany company Donaustahl presented the interesting concept of an unmanned walking tank. The project goes by the name of IBEX. These "walking tanks" are already being tested by the Bundeswehr. Donaustahl is now combining this idea with an unmanned (UGV) platform and - for the concept - with an air defence station.
Source (German): https://donaustahl.bayern/2021/08/26/donaustahl-praesentiert-ibex-ugv-plattform/
Source (German): https://donaustahl.bayern/2021/08/26/donaustahl-praesentiert-ibex-ugv-plattform/
Attachments


- Joined
- 9 October 2009
- Messages
- 21,147
- Reaction score
- 12,249
Nearly forgot about this:

 www.defensenews.com
www.defensenews.com
Milrem and Kongsberg are building a robotic wingman
The Nordic Robotic Wingman is in the works through a Milrem and Kongsberg partnership that is aimed at filling requirements needed in the European theater.
www.defensenews.com
shin_getter
ACCESS: Top Secret
- Joined
- 1 June 2019
- Messages
- 1,010
- Reaction score
- 1,328

UGV für die Infanterie: Grundbefähigung der Systeme bereits heute vorhanden
Die Bundeswehr untersucht in mehreren Studien und Projekten die Eignung von unbemannten Bodenfahrzeugen, im Englischen Unmanned Ground Vehicles (UGV), in unterschiedlichen Einsatzszenarien. Neben einer reinen Technologiebetrachtung finden auch praktische Untersuchungen statt.
In particular, the soldiers of the heavy platoons in the infantry companies have to carry a lot of additional weight in order to be able to offer their comrades fire support by means of grenade machine weapons and MELLS anti-tank guided missile systems. On average, each soldier in the three-man squad carries an additional 75 to 100 kg of additional weight.
According to Wolf's observations, there were no problems with the soldiers operating the UGV. In particular, remote control of the systems on sight seemed to be quick and easy for the soldiers. It became more complicated when the UGV were to be controlled remotely via a display on the hand-held operator station. This required some practice, as the orientation in the room is much more complex only due to the limited perspective of the UGV sensors.
- The systems, especially if they are used as remote-controlled UGVs, are already ready for introduction and are able to relieve the workload of the infantry considerably.
- More complex automated functionalities at UGV, for example the independent driving of routes in a complex, unregulated operational situation, will probably be a long time coming.
- The technology is generally suitable for being introduced for the first time in a comparatively simple and inexpensive form and to be constantly increased in combat value with new functionalities during use, since technological advances in development are strongly software-driven and even additional sensors due to the modular structure of the UGV can be made simple and if necessary can be retrofitted quickly.
As far as the design of the individual systems is concerned, the troops seemed to prefer smaller to medium-sized UGVs over larger systems. The smaller systems were therefore easier to transport to the place of use, and in some cases they can even be taken on the loading areas of the group vehicles. Larger UGVs would have to be loaded onto trailers or pulled behind the combat vehicles. In order for this to be feasible in practice, however, additional trailer systems or a special UGV certification are required so that it can be carried on the road.
-------
There are limits to the systems, particularly in the area of automation. According to the Fraunhofer FKIE, there does not seem to be a realistic picture of the situation on the part of the armed forces. The challenges in this area are probably massively underestimated. Even if such capabilities are touted by individual manufacturers, robust automated functionalities of the UGV are more fiction than reality. As an example, the researchers cite the advances in the automotive industry. There, autonomously driving cars have been touted for years as being on the verge of a breakthrough, and yet the practical problems constantly present manufacturers with new challenges. And the automotive industry has far more resources and much simpler prerequisites,
Exact navigation is the biggest challenge here. In a conflict you have to adjust to a compromised GNSS environment, GNSS stands for Global Navigation Satellite System. The effects of GNSS spoofing can already be seen today in the Baltic or Black Sea, where, for example, ships lying in port are displayed with a position in the middle of the sea. Even without interference from the enemy, the navigation offers enough natural challenges. Höller points out that, at best, satellite-based navigation has an accuracy of plus / minus two meters, in a dense, wet forest it is more than plus / minus 15 meters. This makes it practically impossible to drive even a preprogrammed route by crossing a stream or river over an existing bridge.
Navigation using image recognition technology also has its pitfalls in the military environment, after all soldiers wear camouflage. What is supposed to protect the troops from being discovered during deployment also means that the UGV sensors have a much more difficult time identifying a soldier beyond doubt at all times, as they are blurred with their surroundings.
There are further limits in the area of communication transmission. Here, too, the battlefield has its pitfalls. If hostile disruption measures are to be expected, remote control of the UGV beyond the direct line of sight will hardly be possible. In addition, natural limits must be observed. Here, too, the dense, wet forest - which is quite common in Central Europe - as well as obstacles in the form of reinforced concrete or thick clay walls pose considerable challenges for the systems. In such environments, communication on the frequency bands commonly used for control, for example, is only a few meters. It would be theoretically conceivable to equip the UGV with different, parallel communication systems, which are then used in the optimal performance range depending on the environment.
Last but not least, the UGV design in itself represents a limit for the deployment of soldiers, as the systems can only be deployed according to their mobility. If a small UGV cannot drive over a tree trunk, for example, then the soldier is not allowed to simply step over the tree lying on the ground and continue his march, otherwise the vehicle cannot follow.
For comparison:

'Enemy' Unmanned Ground Vehicles Are Now Facing-Off Against Army Soldiers In Training
The unmanned vehicle made a helicopter landing zone unusable, which could happen during a real battle as adversaries field similar capabilities.
 www.thedrive.com
www.thedrive.com

New Tracked Unmanned Vehicle Bristles With A Whopping 50 Switchblade Suicide Drones
General Dynamics Land Systems' TRX is a modular unmanned ground vehicle design and versions of it will be headed to an Army experiment next year.
www.thedrive.com
------------
Personal thoughts on the matter:
The Chinese 6x6 optionally manned vehicle family is probably a better idea than pure small-UGV without provision for human seating as true independent operations is a while away. LOS controls is low cost and increases formation flexibility.
For combat UGV, indirect fire and air-defense is probably the missions what make the most sense. It'd take stupid amount of bandwidth to drive a direct fire vehicle to properly engage a target compared to mere coordinates for shells, when outside of preplanned defensive action.
The tech to look for in the near future is error-correcting stitching of high quality sensor maps....
SASCorp from Spain has unveiled the prototype for their new 6X6 amphibious UGV the "Valkyrie"

 www.edrmagazine.eu
www.edrmagazine.eu


Valkyrie, an amphibious 6x6 UGV by SASCorp - EDR Magazine
By Paolo Valpolini After slightly more than one year since the project started, SASCorp of Spain unveiled the prototype of
www.edrmagazine.eu
- Joined
- 21 April 2009
- Messages
- 13,566
- Reaction score
- 7,193
Forest Green
ACCESS: Above Top Secret
- Joined
- 11 June 2019
- Messages
- 7,901
- Reaction score
- 13,348
Killer Robots Aren't Science Fiction. A Push to Ban Them is Growing.
It may have seemed like an obscure United Nations conclave, but a meeting this week in Geneva was followed intently by experts in artificial intelligence, military strategy, disarmament and humanitarian law. The reason for the interest? Killer robots — drones, guns and bombs that decide on their...

RBSL-led consortium delivers concepts for Dstl’s future UGV study
We design, manufacture and support military vehicles used by the British Army and international customers at our UK sites in Telford, Dorset, Bristol, and near Newcastle.
rbsl.com





Safran Wins New Contract for FURIOUS Programme - MOENCH PUBLISHING GROUP
Innovative Land Robotics Development Project
 monch.com
monch.com
- Joined
- 21 April 2009
- Messages
- 13,566
- Reaction score
- 7,193
Ukraine Unveils Mini "Terminator" Ground Robot Equipped With Machine Gun | ZeroHedge
ZeroHedge - On a long enough timeline, the survival rate for everyone drops to zero
 www.zerohedge.com
www.zerohedge.com
jsport
what do you know about surfing Major? you're from-
- Joined
- 27 July 2011
- Messages
- 7,105
- Reaction score
- 4,831

Alarming Footage Shows Robot Battle Tank Blowing Up Cars
A new video shared by Estonian robotics and autonomous systems developer Milrem Robotics shows an autonomous tank blowing up cars and other targets.
 futurism.com
futurism.com
shin_getter
ACCESS: Top Secret
- Joined
- 1 June 2019
- Messages
- 1,010
- Reaction score
- 1,328
- Joined
- 21 April 2009
- Messages
- 13,566
- Reaction score
- 7,193

The Netherlands Has Deployed NATO’s First Killer Robot Ground Vehicles
The killer ground drone revolution is here.
 www.vice.com
www.vice.com
- Joined
- 9 October 2009
- Messages
- 21,147
- Reaction score
- 12,249
- Joined
- 9 October 2009
- Messages
- 21,147
- Reaction score
- 12,249
From November 4th:

UK Military Ground Drone Trialed for Scanning Hazardous Environments
The UK Defence Science and Technology Laboratory’s hybrid area reconnaissance and survey ground drone has completed a five-week field trial.www.thedefensepost.com
aonestudio
I really should change my personal text
- Joined
- 11 March 2018
- Messages
- 2,866
- Reaction score
- 7,062

Milrem Robotics to deliver 14 THeMIS UGVs to Ukraine in cooperation with KMW - EDR Magazine
29 November 2022 – Tallinn / Munich – The leading European robotics and autonomous systems developer, Milrem Robotics, and the
www.edrmagazine.eu
Forest Green
ACCESS: Above Top Secret
- Joined
- 11 June 2019
- Messages
- 7,901
- Reaction score
- 13,348

Milrem Robotics new THeMIS combat UGV with Loitering Munitions allows
Milrem Robotics unveils a new THeMIS Combat Unmanned Ground Vehicle (UGV) equipped with loitering munitions that allow engaging targets farther behind enem
 www.armyrecognition.com
www.armyrecognition.com
Forest Green
ACCESS: Above Top Secret
- Joined
- 11 June 2019
- Messages
- 7,901
- Reaction score
- 13,348
Milrem Robotics new THeMIS combat UGV with Loitering Munitions allows
Milrem Robotics unveils a new THeMIS Combat Unmanned Ground Vehicle (UGV) equipped with loitering munitions that allow engaging targets farther behind enem
HUNTER 2-S (SWARM CAPABILITY) | EDGE PRODUCT
The HUNTER 2-S is tactical drone that can be deployed in a swarm. The unmanned aerial vehicle (UAV) is equipped with artificial intelligence (AI) technology that enables it to share information with other drones within the swarm. The swarming drones are able to track and maintain their relative...
Discovery of Milosh V2 Unmanned Ground Vehicle from Serbia | Defense News September 2023 Global Security army industry | Defense Security global news industry army year 2023 | Archive News year
Discovery of Milosh V2 Unmanned Ground Vehicle from Serbia
shin_getter
ACCESS: Top Secret
- Joined
- 1 June 2019
- Messages
- 1,010
- Reaction score
- 1,328


Ground vehicles are the new frontier in Ukraine's drone war
After the role of unmanned aerial vehicles in the Ukraine war expanded dramatically since Russia invaded 16 months ago, attention is turning to ground drones that developers say could be the next frontier in military innovation.
These things seems to have an effect in the currently active campaign.
Forest Green
ACCESS: Above Top Secret
- Joined
- 11 June 2019
- Messages
- 7,901
- Reaction score
- 13,348
The Armed Forces of Ukraine showed the operation of a ground drone
Last edited:
Forest Green
ACCESS: Above Top Secret
- Joined
- 11 June 2019
- Messages
- 7,901
- Reaction score
- 13,348
aonestudio
I really should change my personal text
- Joined
- 11 March 2018
- Messages
- 2,866
- Reaction score
- 7,062
Forest Green
ACCESS: Above Top Secret
- Joined
- 11 June 2019
- Messages
- 7,901
- Reaction score
- 13,348
Similar threads
-

-
 Lambda Automata 'Outpost' autonomous surveillance tower system
Lambda Automata 'Outpost' autonomous surveillance tower system- Started by Grey Havoc
- Replies: 0
-
 U.S. Transportation Secretary Announces Unmanned Aircraft Registration
U.S. Transportation Secretary Announces Unmanned Aircraft Registration- Started by Dragon029
- Replies: 9
-
-
USN 'Ghost Fleet' Large Unmanned Surface Vessel (LUSV)
- Started by Grey Havoc
- Replies: 54