- Joined
- 1 April 2006
- Messages
- 11,397
- Reaction score
- 10,314
DARPA Opts To End Boeing-Led X-50A Dragonfly UAV Effort
By Jefferson Morris/Aerospace Daily & Defense Report
09/11/2006 09:35:13 AM
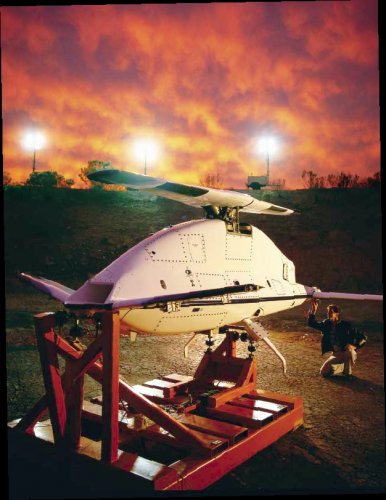
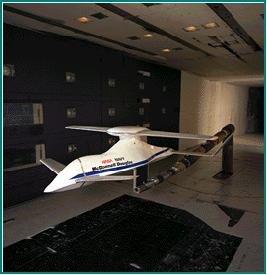
The Defense Advanced Research Projects Agency has opted to end the X-50A Dragonfly unmanned aerial vehicle (UAV) program, which was attempting to pioneer a new type of helicopter capable of stopping its rotor in flight and cruising as a fixed-wing jet until it lost both of its flight prototypes in crashes.
Boeing, the prime contractor for the $51.8 million effort, will spend the rest of the program funds preparing a final study that will "draw together final ideas on the potential value of the stopped rotor concept," DARPA spokeswoman Jan Walker told The DAILY. The study should be completed by late fall.
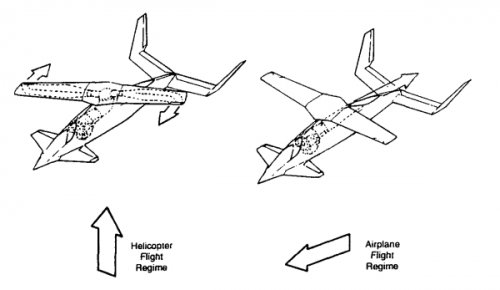
Dragonfly never got as far as a "conversion" flight, which would have seen the aircraft take off as a helicopter, stop its rotor in mid-air for forward cruise, then convert back to a helicopter for landing.
After its first crash in March 2004 at Yuma Proving Ground in Arizona, the aircraft resumed flight in late 2005 with its only spare and got as far as slow forward flight during testing through March 2006. Then, 18 minutes into an envelope expansion flight on April 12, the second Dragonfly lost control and was damaged beyond repair (DAILY, April 21).
A review concluded that the aircraft was lost because of insufficient low-speed control authority, according to DARPA. Fuselage aerodynamic pitch moment for the Dragonfly was very sensitive to airspeed and wake strength. During its final flight, the impact of the rotor's wake on the fuselage caused the Dragonfly to pitch upward, and the flight control system was unable to recover.
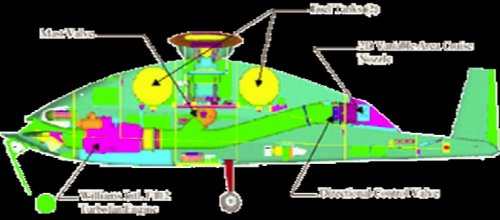
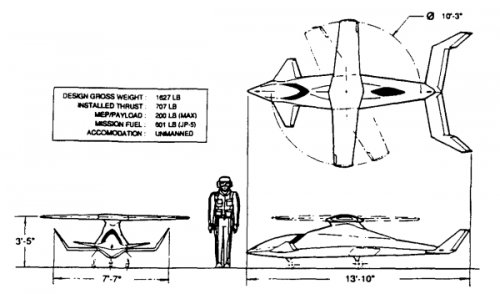
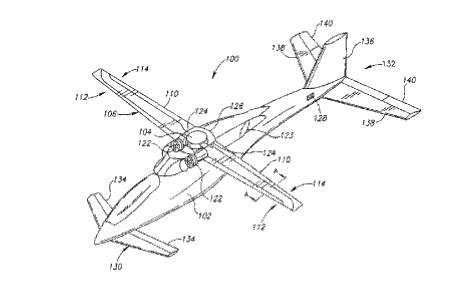
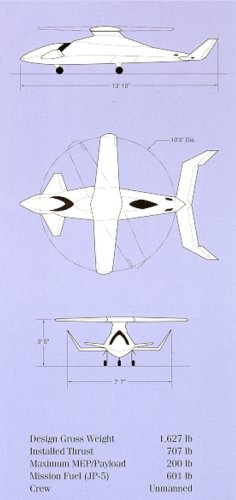
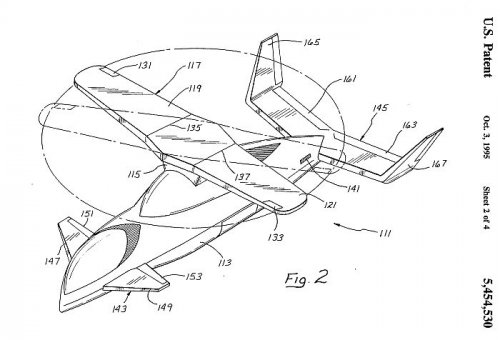
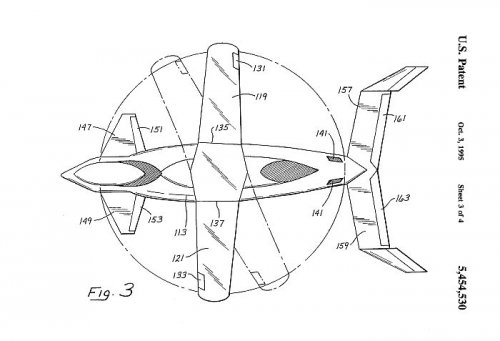
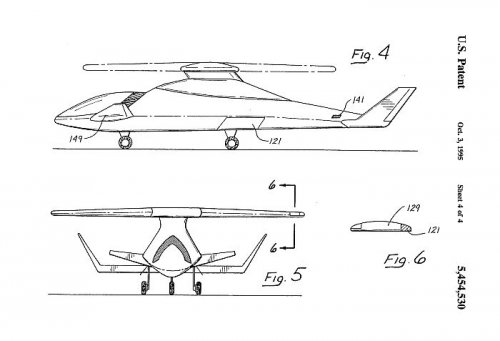
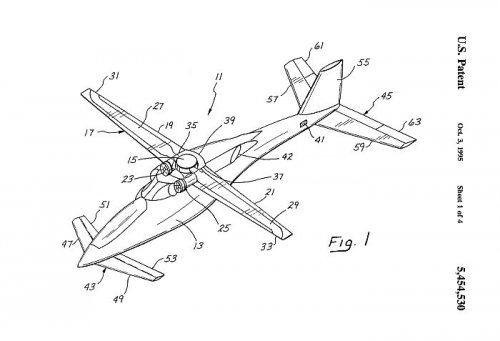
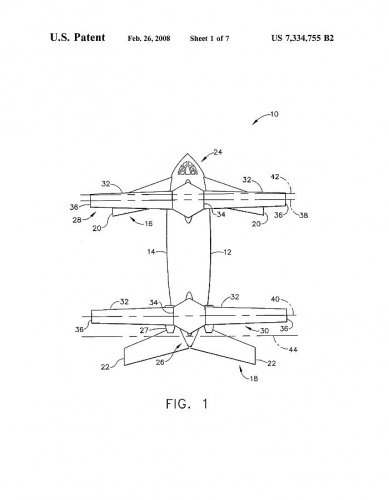
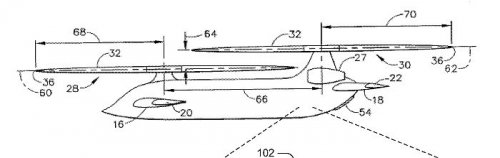
Like a tiltrotor, the Dragonfly was intended to combine the operational flexibility of a rotorcraft with the speed of a fixed-wing aircraft. It featured an unusually wide rotor that operated on the same principle as a rotating lawn sprinkler. Exhaust from the aircraft's turbofan engine was directed up the rotor assembly and through outlets at the rotor tips to cause the rotor to spin.
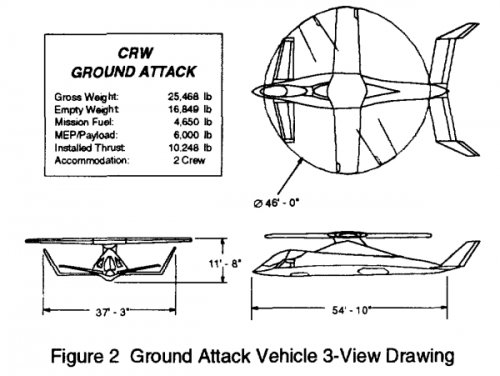
For fixed-wing flight, the exhaust was directed out the aircraft's tail, causing the rotor to stop spinning and act as a wing, while additional lift was provided by the aircraft's fuselage and canards. The concept was called Canard Rotor/Wing (CRW).
Control problems related to the Dragonfly's unique design dogged the program from the beginning, causing the aircraft to drift unexpectedly during initial hover tests. The first prototype had performed only two brief hovers before the first crash in March 2004.
After a lengthy investigation, that mishap was linked to a cross-coupling control phenomenon intrinsic to the aircraft's design. The problem was believed solved by modifications to flight software.
Once the concept was proven, Boeing had hoped to market CRW aircraft to the military, and discussed with the Marine Corps the possibility of unmanned CRW aircraft serving as escorts for the V-22 Osprey.
By Jefferson Morris/Aerospace Daily & Defense Report
09/11/2006 09:35:13 AM
The Defense Advanced Research Projects Agency has opted to end the X-50A Dragonfly unmanned aerial vehicle (UAV) program, which was attempting to pioneer a new type of helicopter capable of stopping its rotor in flight and cruising as a fixed-wing jet until it lost both of its flight prototypes in crashes.
Boeing, the prime contractor for the $51.8 million effort, will spend the rest of the program funds preparing a final study that will "draw together final ideas on the potential value of the stopped rotor concept," DARPA spokeswoman Jan Walker told The DAILY. The study should be completed by late fall.
Dragonfly never got as far as a "conversion" flight, which would have seen the aircraft take off as a helicopter, stop its rotor in mid-air for forward cruise, then convert back to a helicopter for landing.
After its first crash in March 2004 at Yuma Proving Ground in Arizona, the aircraft resumed flight in late 2005 with its only spare and got as far as slow forward flight during testing through March 2006. Then, 18 minutes into an envelope expansion flight on April 12, the second Dragonfly lost control and was damaged beyond repair (DAILY, April 21).
A review concluded that the aircraft was lost because of insufficient low-speed control authority, according to DARPA. Fuselage aerodynamic pitch moment for the Dragonfly was very sensitive to airspeed and wake strength. During its final flight, the impact of the rotor's wake on the fuselage caused the Dragonfly to pitch upward, and the flight control system was unable to recover.
Like a tiltrotor, the Dragonfly was intended to combine the operational flexibility of a rotorcraft with the speed of a fixed-wing aircraft. It featured an unusually wide rotor that operated on the same principle as a rotating lawn sprinkler. Exhaust from the aircraft's turbofan engine was directed up the rotor assembly and through outlets at the rotor tips to cause the rotor to spin.
For fixed-wing flight, the exhaust was directed out the aircraft's tail, causing the rotor to stop spinning and act as a wing, while additional lift was provided by the aircraft's fuselage and canards. The concept was called Canard Rotor/Wing (CRW).
Control problems related to the Dragonfly's unique design dogged the program from the beginning, causing the aircraft to drift unexpectedly during initial hover tests. The first prototype had performed only two brief hovers before the first crash in March 2004.
After a lengthy investigation, that mishap was linked to a cross-coupling control phenomenon intrinsic to the aircraft's design. The problem was believed solved by modifications to flight software.
Once the concept was proven, Boeing had hoped to market CRW aircraft to the military, and discussed with the Marine Corps the possibility of unmanned CRW aircraft serving as escorts for the V-22 Osprey.